AX-Series Motion Controller Instructions Manual Chapter 2
18
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error
Code) to address the problem.
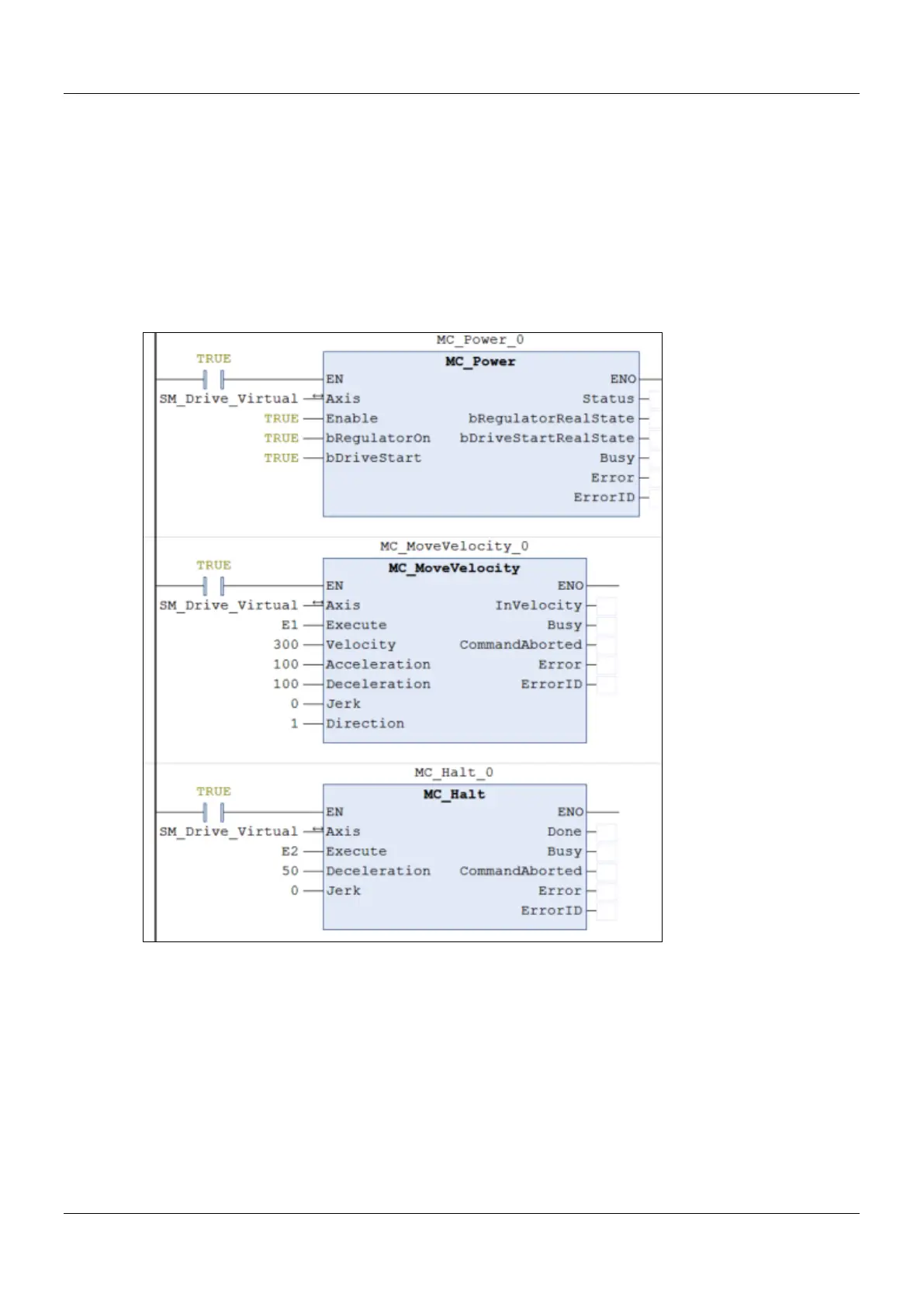
Example
The example below shows the behavior and position tracking when MC_Halt is run after MC_MoveVelocity.
The MC_Halt stops MC_MoveVelocity if there is no another instruction run before the axis enters “Standstill” state.l”.
If MC_MoveVelocity runs again during the deceleration, it will abort MC_Halt immediately and accelerate again without
entering “Standstill” state. This re-execution behavior is allowed for MC_Halt but not allowed iMC_Stop.
Timing Diagram
 Loading...
Loading...

