AX-Series Motion Controller Instructions Manual Chapter 2
349
Inputs/Outputs
Master Specify the master axis. AXIS_REF_SM3 AXIS_REF_SM3
*
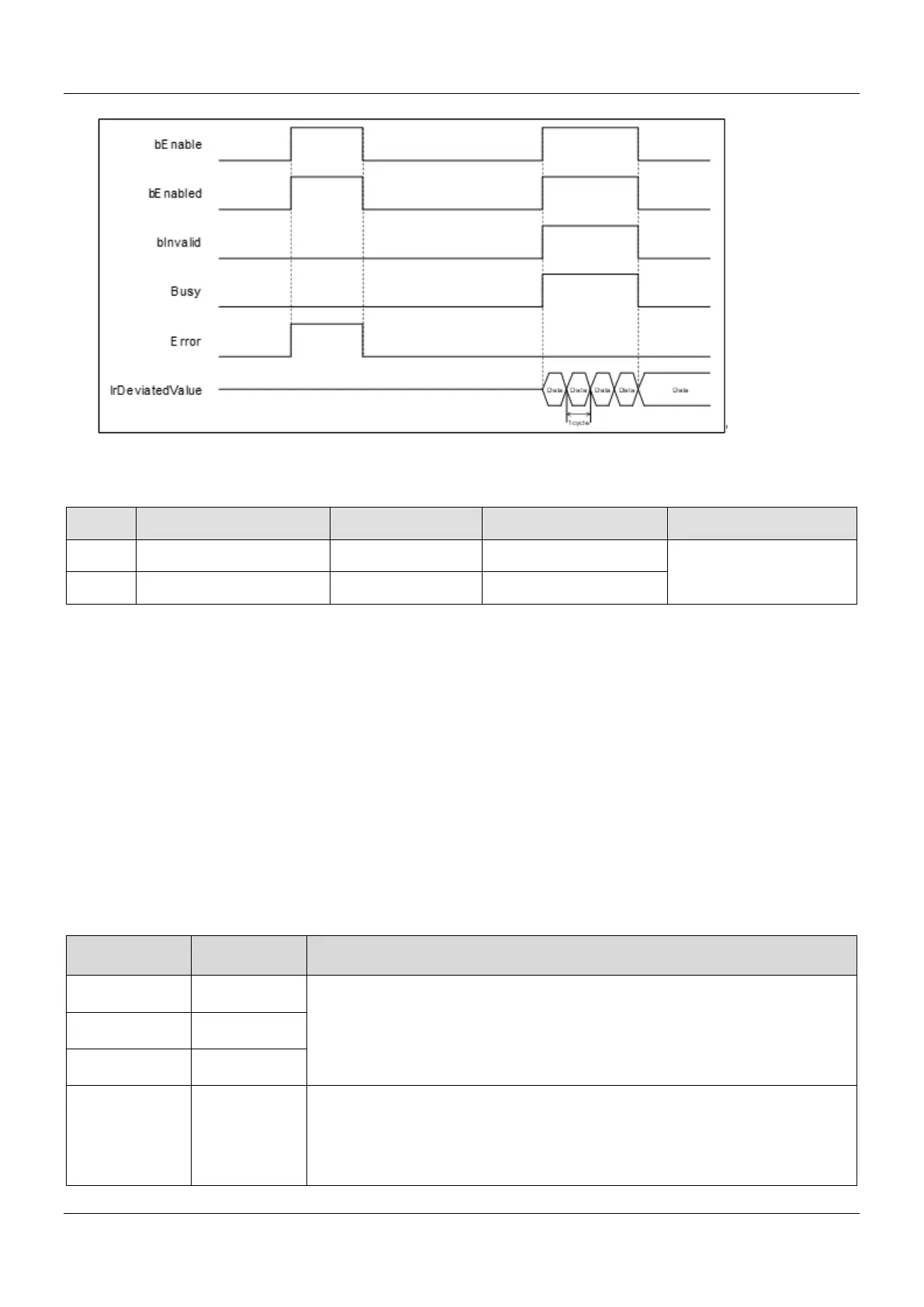
When bEnable turns to
True.
*
*Note:
AXIS_REF_SM3 (FB): The interface is built in every function block and works as the starting program of the function block.
Function
DMC_AxesObserve checks if the deviation between the master axis position and slave axis position exceeds the
allowed Setting Value.
When |lrDeviatedValue|is > lrPermittedDeviation, bInvalid changes to True.
It is suggested that the same mode should be set for the master and slave axes. If one is set as a linear axis and the
other is set as a rotary axis, the calculation of the error between axes will be done in linear axis mode.
When both the master axis and slave axis are rotary axes but their distances per rotation are different, the calculation
of lrDeviatedValue (error between axes) is done in linear axis mode.
bRotarySelectDeviation is valid only when the distances per rotation for the master axis and slave axis are the same.
False means to read the shorter direction and True means to read the longer direction.
Calculation of lrDeviatedValue
Master axis
Slave axis
Calculation method
Linear axis Linear axis
lrDeviatedValue (Error between axes) = Master axis position – Slave axis position
Rotary axis Linear axis
Linear axis Rotary axis
Rotary axis Rotary axis
lrDeviatedValue (Error between axes) = Master axis position – Slave axis position
lrDeviatedValue (Error between axes) = Distance per rotation– (Master axis position –
Slave axis position)
lrDeviatedValue outputs the value of the longer or shorter distance according to the
 Loading...
Loading...

