AX-Series Motion Controller Instructions Manual Chapter 2
399
*Note: DMC_ERROR: Enumeration (Enum)
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bBusy When bEnable turns to True. When bError turns to True.
When an error occurs in the execution
conditions or input values of the
When bEnable turns to False. (Error Code is
cleared)
ErrorID
lrCamSlavePosition
Update information when bEnable is
True.
Will not update information when bEnable is
False.
lrCamSlaveVelocity
Update information when bEnable is
True.
Will not update information when bEnable is
False.
lrCamSlaveAcceleration
Update information when bEnable is
Will not update information when bEnable is
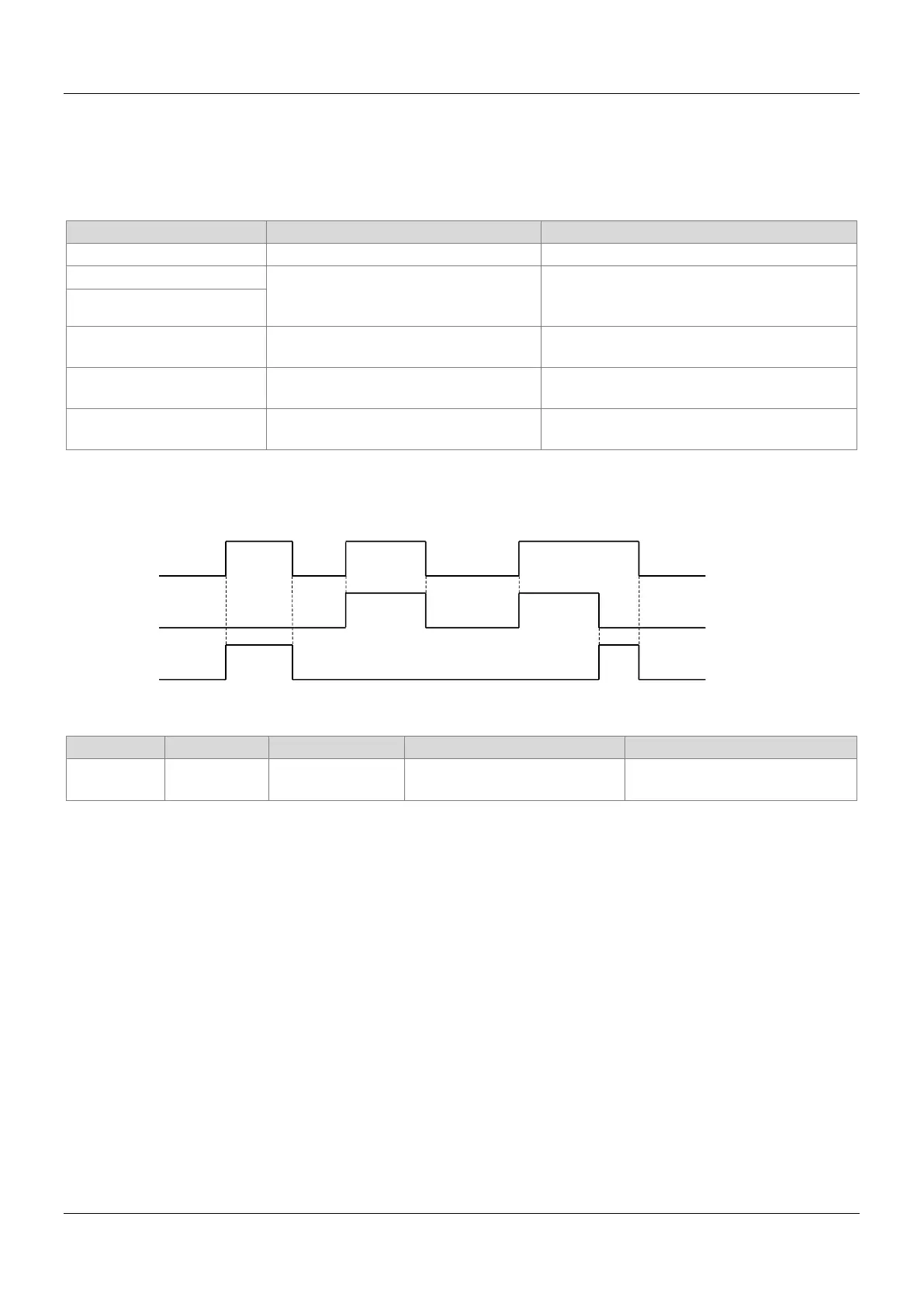
Timing Diagram
Inputs/Outputs
CamTable
Specify the
cam table.
MC_CAM_REF* MC_CAM_REF When bEnable turns to True
*Note: MC_CAM_REF (FB): User-defined camtable parameters.
Function
This function is available for DL_MotionControl V1.2.3.0 or later.
By entering the master slave position with this function block, you can get the slave axis position
(lrCamSlavePosition), the slave axis velocity ratio (lrCamSlaveVelocity), and the slave axis acceleration ratio
(lrCamSlaveAcceleration) of the specified cam table.
When the type of cam table is polynomial (XYVA Type), you can get complete information. If the tye is one-
dimensional table of slave positions or two-dimensional table of related master/slave positions, then the function
block does not provide information about the acceleration ratio of the slave axis (lrCamSlaveAcceleration).
When the cam table slave axis starts and ends at the same position, the velocity and acceleration will both be NaN.
Troubleshooting
If an error occurs during the execution of the instruction, bError will turn to True. To confirm current error state, see
the error code in ErrorID.
For the error codes and corresponding troubleshooting methods, refer to the Appendix of this manual.
 Loading...
Loading...

