AX-Series Motion Controller Instructions Manual Chapter 2
449
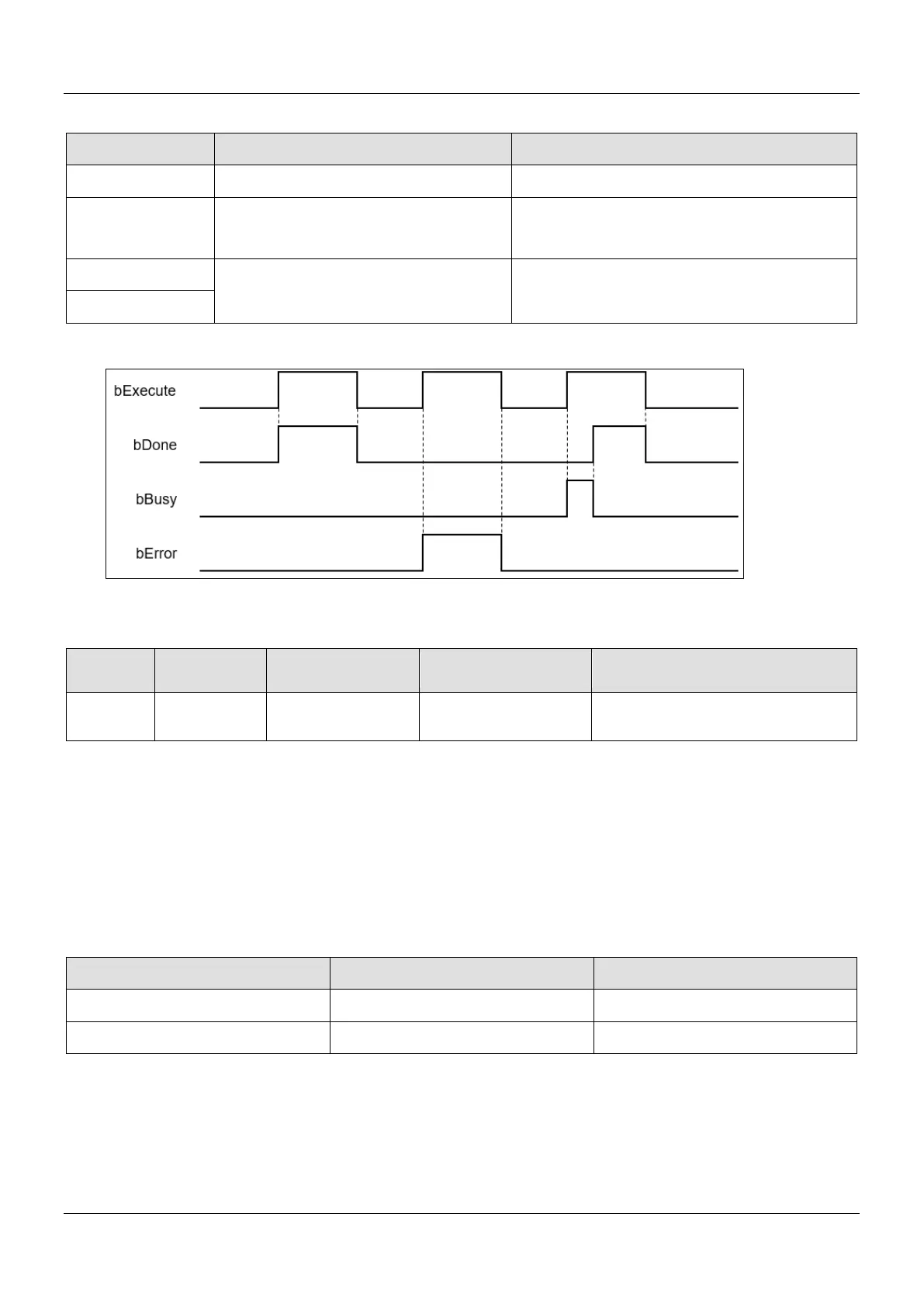
Timing for shifting to True
Timing for shifting to False
bDone
When initialization is completed.
bExecute
turns from True to False.
bBusy
When bExecute turns to True and the
instruction is run.
When initialization is in progress.
When bDone turns to True.
When bError turns to True.
When an error occurs in the execution
conditions or input values for the
instruction.
When bExecute turns to False. (Error Code is
cleared)
ErrorID
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value
Timing to Take Effect
Axis
Specify the
axis.
AXIS_REF_DML* AXIS_REF_DML
When bExecute turns to True and bBusy
is False.
*Note:
AXIS_REF_DML (FB): All function blocks contain this variable, which works as the starting program for function blocks.
Function
MC_ReinitDrive_DML is used to initialize the drive which has an error or is no longer in synchronization.
Resetting the network cannot clear errors of the positioning axis itself, e.g. left and right limits, emergency stop and etc.
The function block resets EtherCAT network of the positioning axis and keeps the servo in the previous servo state.
Refer to the following table for details.
Servo Off Servo Off Servo Off
Troubleshooting
When an error occurs during the execution of the instruction, bError changes to True. To confirm the current error state,
see the error code in ErrorID.
 Loading...
Loading...

