AX-Series Motion Controller Instructions Manual Chapter 2
468
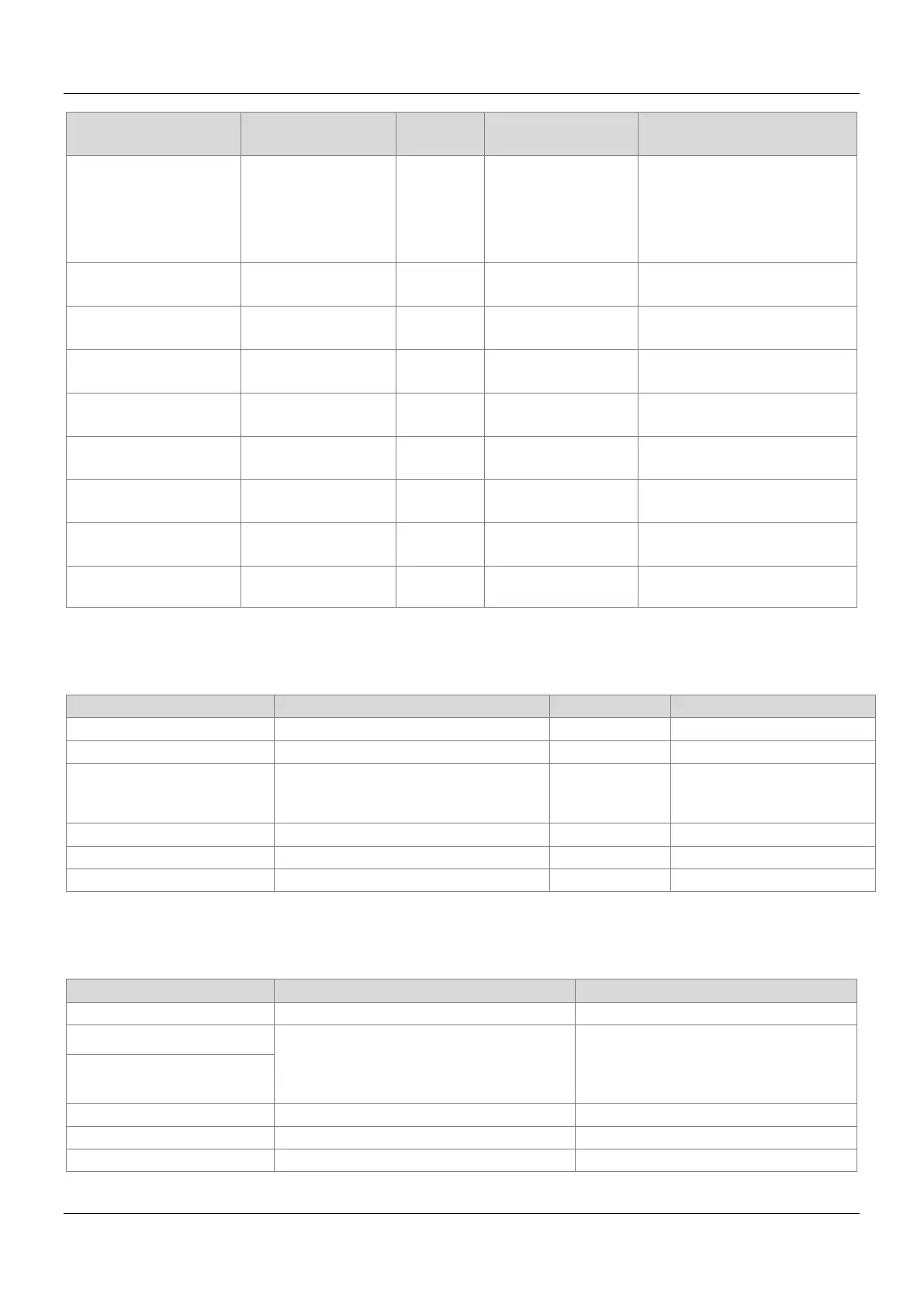
Name Function Data Type
Setting Value
Timing to Take Effect
lrLineSpeedValue
(m/min)
LREAL
0.0~3000.0
(0)
When Enable turns to True
uiTensionTargetValue
value (N)
UINT
0~65535
(0)
When Enable turns to True
uiTensionTargetValue_At
ZeroSpeed
Zero
value (N)
UINT
0~65535
When Enable turns to True
lrPID_TargetValue PID target value (%) LREAL
0~100
(50.0)
When Enable turns to True
lrPID_Gain_P_1st
1(%)
LREAL
0.0~1000.0
When Enable turns to True
lrPID_Time_I_1st
integration time 1
LREAL
0.0~500.0
When Enable turns to True
lrPID_Gain_P_2nd
2(%)
LREAL
0.0~1000.0
(50.0)
When Enable turns to True
lrPID_Time_I_2nd
integration time 2
LREAL
0.0~500.0
(1.0)
When Enable turns to True
bPID_OutputNegativePol
arity
*
status selection
BOOL True/False (False)
When Enable turns to True
*Note: When the bPID_OutputNegativePolarity is False, the PID output is positive.
Outputs
Setting Value (Default Value)
True when the instruction is running.
bError True when an error occurs. BOOL True/False (False)
ErrorID
Record the error code when an error
occurs. Refer to Appendix for error code
descriptions.
DML_ERROR*
DML _ERROR
(DML _NO_ERROR)
Read the current line speed.
正数或 0 (0)
uiTensionTargetValue_read Read the current roll diameter. UINT
正数或
lrCurrentRollDiameter_read Read the tension command value. LREAL
正数或 0 (0)
*Note: DMC_ERROR: Enumeration (Enum)
Output Update Timing
Timing for shifting to True
Timing for shifting to False
bBusy When bExecute turns to TRUE. When bError turns to True.
bError
When an error occurs in the execution
conditions or input values for the
instruction. (Error code is recorded in
When bExecute turns to False. (Error
Code is cleared)
ErrorID
lrLineSpeedValue_read Continuous update when bBusy is True. Stop updating when bBusy is False.
uiTensionTargetValue_read Continuous update when bBusy is True. Stop updating when bBusy is False.
lrCurrentRollDiameter_read
Continuous update when bBusy is True.
Stop updating when bBusy is False.
 Loading...
Loading...

