AX-Series Motion Controller Instructions Manual Chapter 2
43
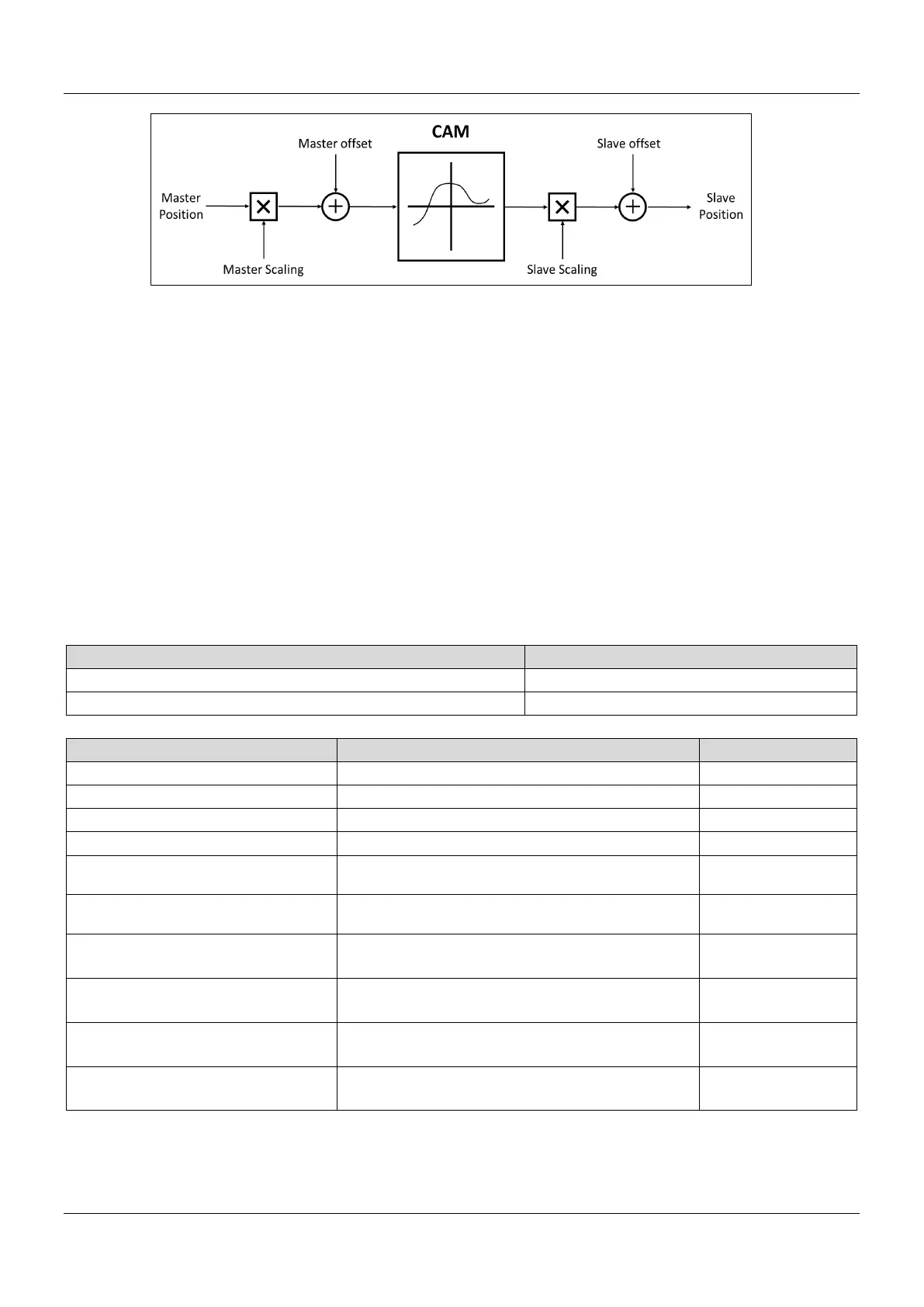
The following formula is generated from the figure above:
Position_Slave=SlaveScaling×CAM(MasterScaling×MasterPosition+MasterCompensation)+
SlaveCompensation
It can be seen that when master axis is in absolute mode, master position is the remainder of the current master
position divided by modulo; When master axis is in relative mode, master position is the start point position (usually
0) of master axis in the corresponding cam curve.
Relation between StartMode and MasterAbsolute/ SlaveAbsolute of CamTableSelect
Absolute mode (StartMode = 0): The slave current position is not involved in the Cam calculation as the cam
synchronization starts, However, a jump can be caused if the current position of slave axis and its start position
from the Cam are not the same
Relative mode (StartMode = 1): Cam changes according to the current position of slave axis, which the slave axis
position will be added to the slave current position for calculation. If the slave setpoint position according to the
cam is not at the start point 0, a jump may occur.
Ramp mode (StartMode = 2, 3, 4): Add a motion curve for compensation according to VelocityDif, Acceleration,
Deceleration, and Jerk, so as to prevent a jump in cam when meshing starts.
MC_CamTableSelect.MasterAbsolute
absolute Absolute mode
MC_CamTableSelect.SlaveAbsolute
ramp_in True
Ramp in Absolute
mode
ramp_in False
Ramp in Relative
ramp_in_pos True
Ramp in positive
Absolute mode
ramp_in_pos False
Ramp in positive
ramp_in_neg True
Ramp in negative
ramp_in_neg False
Ramp in negative
Relative mode
Cam table
 Loading...
Loading...

