AX-Series Motion Controller Instructions Manual Chapter 2
480
lrGearRatio Reduction gear ratio LREAL Positive
lrRPMmotor Max RPM of the motor LREAL Positive
Outputs
Output Range (Default Value)
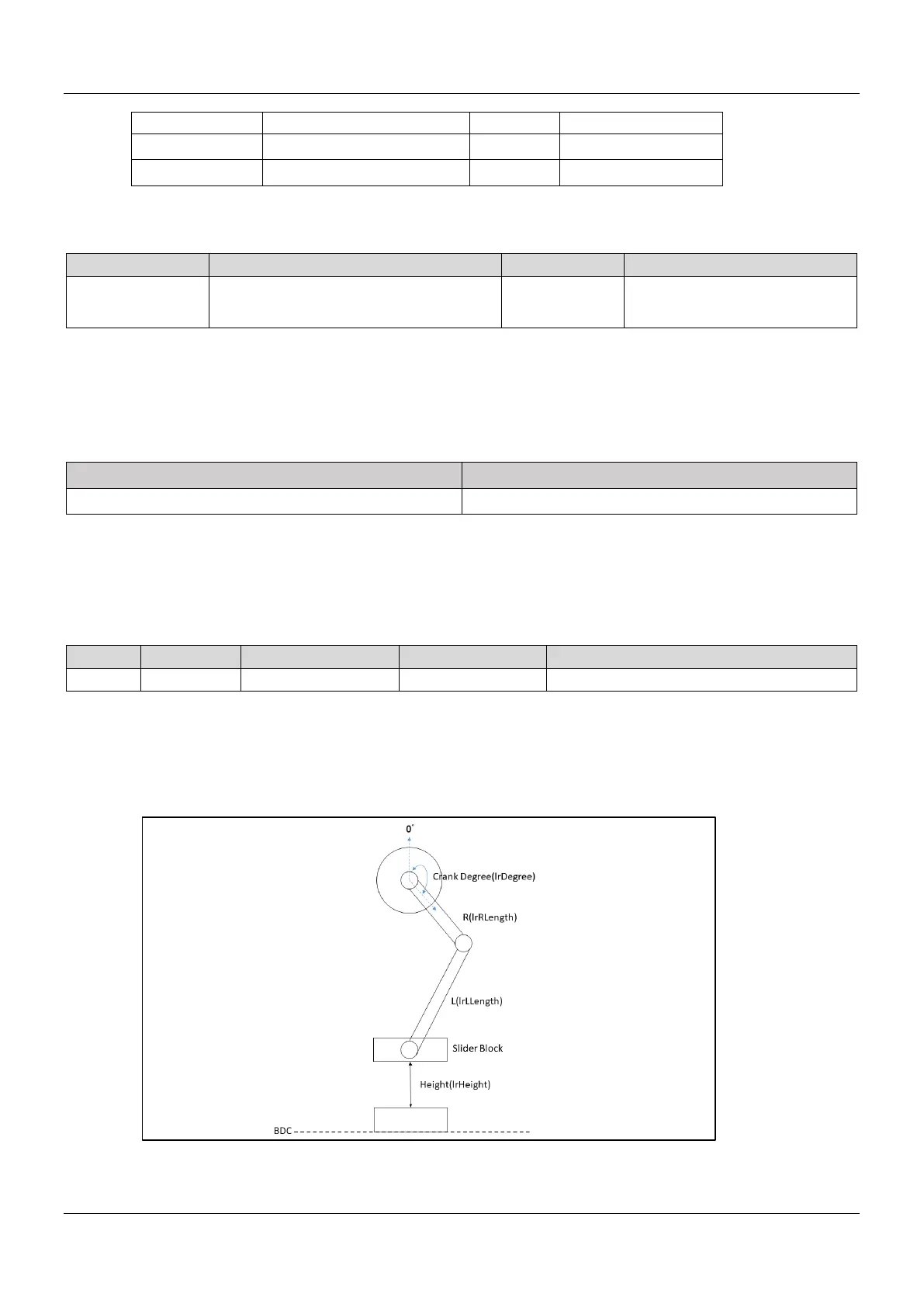
lrHeight The height of slider. LREAL
*1
0 < lrHeight < 2*lrRLength
*Note1: LREAL Range:
Negative values: between -1.7976931348623157E+308 and -4.9406564584124654E-324
Zero: 0
Positive values: between 4.9406564584124654E-324 and 1.7976931348623157E+308
Output Update Timing
Name Timing for shifting to True
- -
Timing Diagram
-
Inputs/Outputs
- - - - -
Function
Input MachParameters, and lrDegree. The function block will calculate out Slider Height (lrHeight).
In this case, invalid values are set, lrHeight will keep output 0.
Schematic diagram:
Troubleshooting
 Loading...
Loading...

