AX-Series Motion Controller Instructions Manual Chapter 2
496
bBusy Status when FB is busy to write ECAM table BOOL False/True (False)
bError Status when FB has problems writing ECAM BOOL False/True (False)
dwErrorID Error Code when running FB DWORD DWORD(0)
lrSPMbound*
2
Upper bound SPM value, based on input
key-points
LREAL*
1
LREAL(0)
lrMasterSpeed Master axis speed(unit = deg/sec) LREAL*
1
LREAL(0)
*Note1: LREAL Range:
Positive values: -1.7976931348623157E+308 to -4.9406564584124654E-324
Zero: 0
Negative values: 4.9406564584124654E-324 to 1.7976931348623157E+308
*Note2: Valid MachParameters.lrSPMsys should not exceed lrSPMbound value. lrSPMbound is the max speed of the
motor.
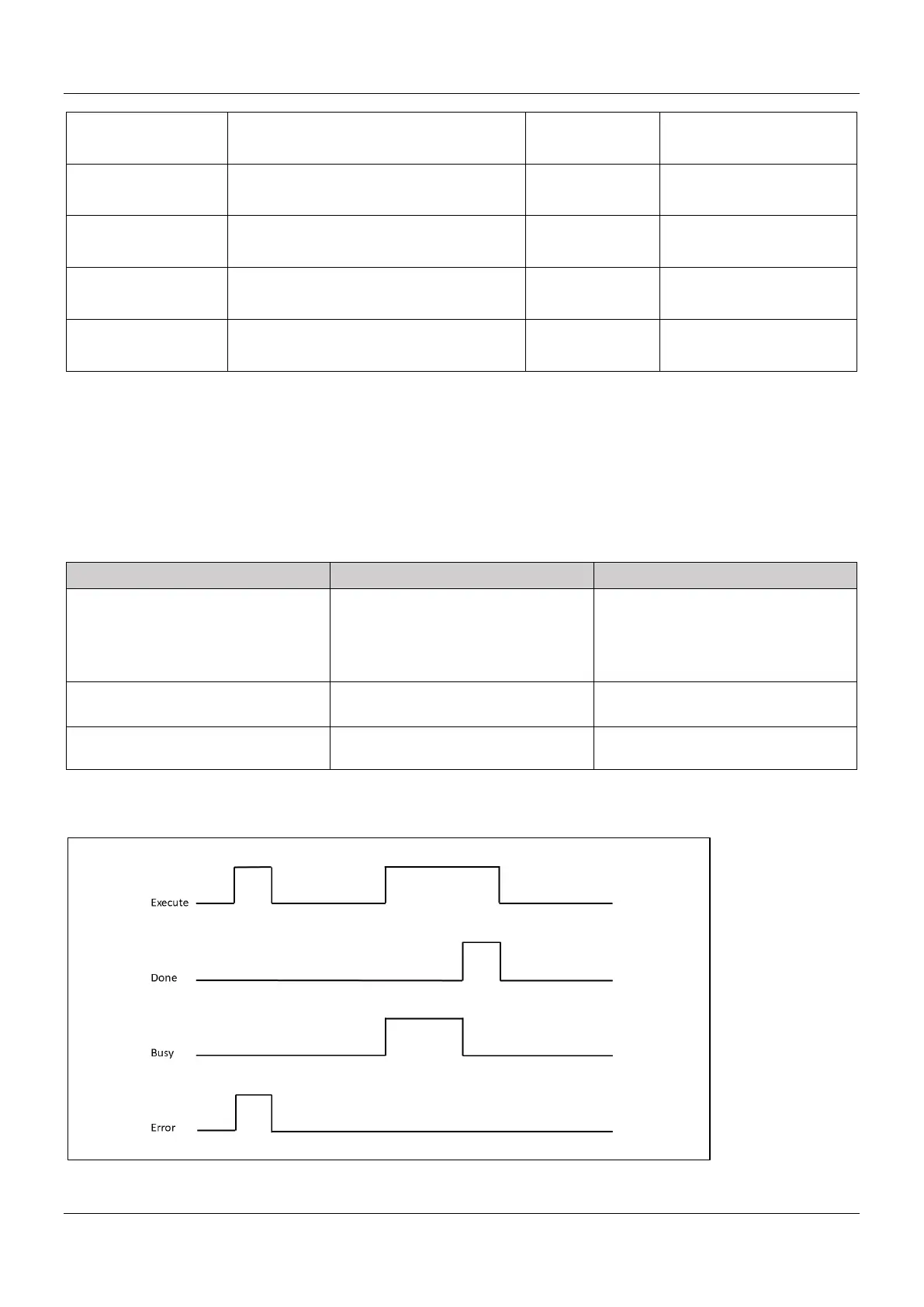
Output Update Timing
Name Timing for shifting to True Timing for shifting to False
bDone
bExecute=True + FB finish ECAM table
write
bExcute
If bExecute is False and bDone turns to
True, then bDone
immediately after maintaining the True
state for one scan cycle.
bBusy
bExecute
=True + FB is writing ECAM
table
bDone
When bError turns to True
bError
bExecute
code(non-zero)
When bExecute turns to False.
Timing Diagram
 Loading...
Loading...

