AX-Series Motion Controller Instructions Manual Chapter 2
56
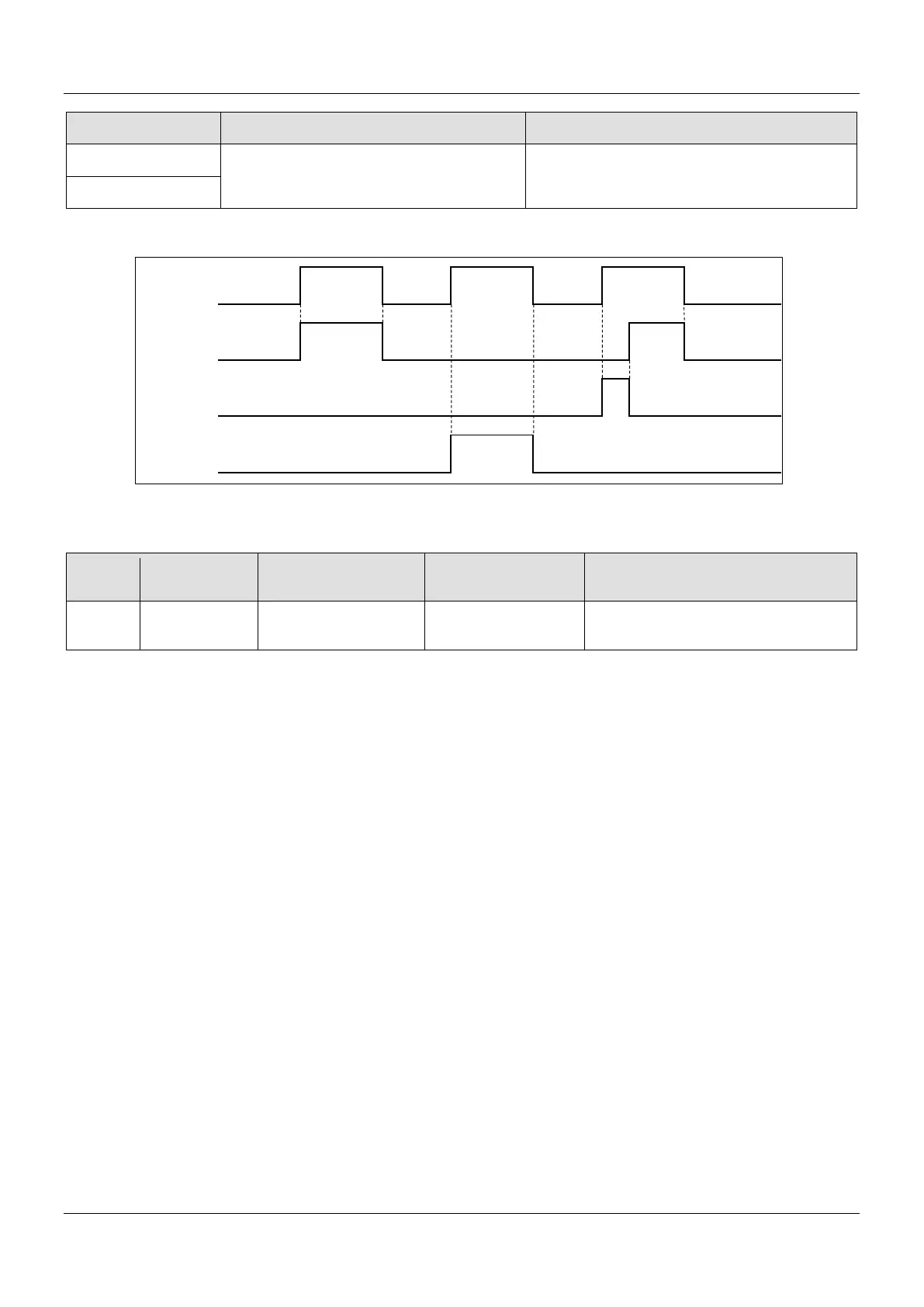
Name Timing for Shifting to True Timing for Shifting to False
When an error occurs in the execution
conditions or input values for the
instruction.
When Execute is False. (Error codes are
cleared.)
ErrorID
Timing Diagram
Inputs/Outputs
Name Function Data Type
Setting Value
Timing to Take Effect
Slave
Specifies the
slave axis.
AXIS_REF_SM3* AXIS_REF_SM3
When Execute turns to True and Busy is
False.
*Note: AXIS_REF_SM3(FB): Every function block contains this variable, which works as the starting program for function blocks.
Function
When the slave axis is decoupled from the master axis by MC_CamOut, it moves with the sustained velocity and the
slave state is under ContinuousMotion. (irrelevant to the velocity of slave axis)
If the synchronization between master and slave axis is not established while executing MC_CamOut. An error of
SMC_AXIS_NOT_READY_FOR_MOTION(34) will be reported.
The axis state still remains continuous_motion, even though the slave axis is desynchronized at standstill with velocity
0.
Troubleshooting
If an error occurs during the execution of the instruction, Error will change to True. You can refer to ErrorID (Error
Code) to address the problem.
Example
The following example gives the operation result of MC_CamOut. The master and slave axis in this example are
rotary axes.
Cam curve planning
 Loading...
Loading...

