AX-Series Motion Controller Instructions Manual Chapter 2
63
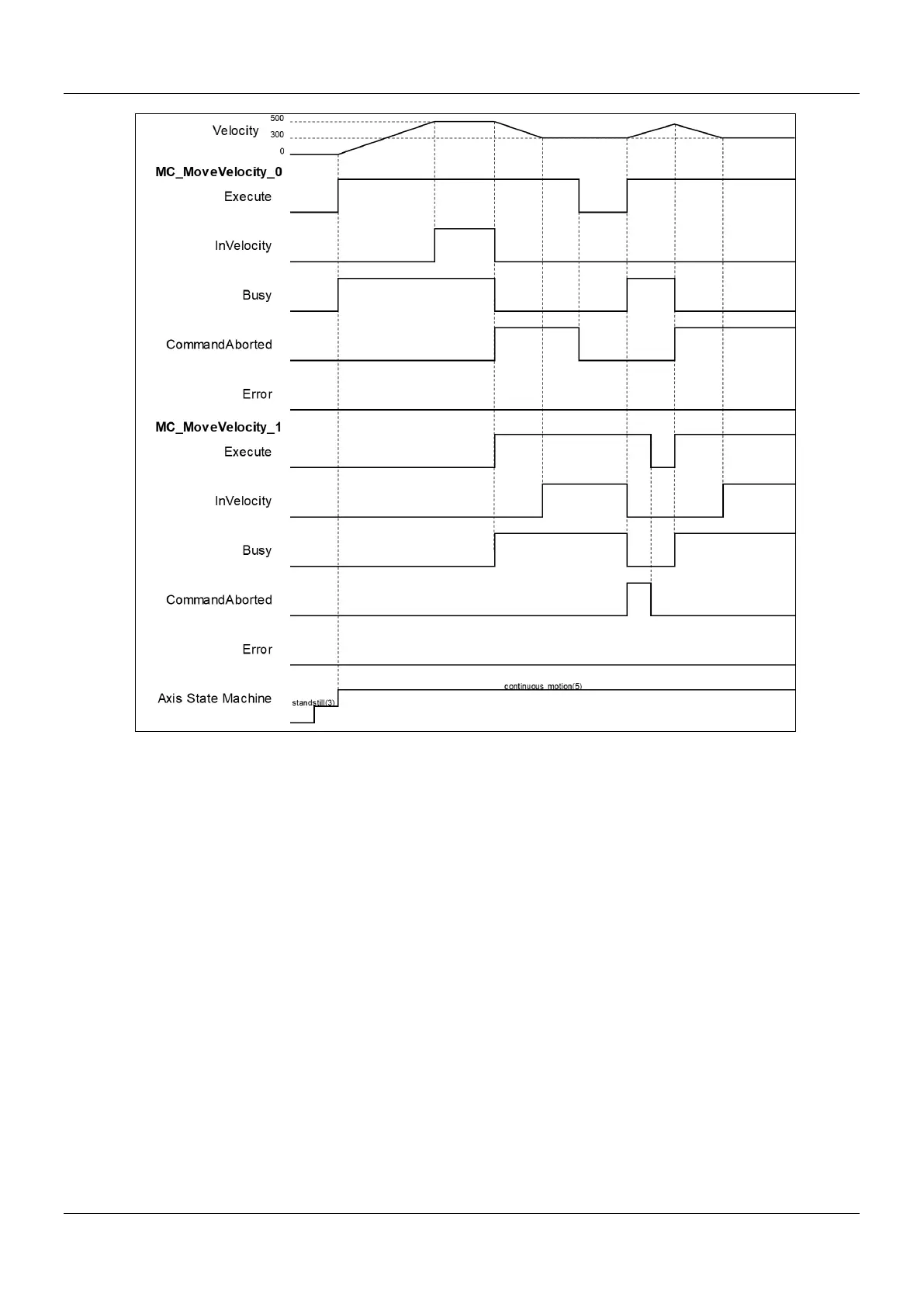
When Execute changes to True, the first MC_MoveVelocity controls the axis to reach the specified target velocity
500. When it reaches 500, InVelocity changes to True.
If Execute of MC_MoveVelocity_1 changes to True, InVelocity will change to False and CommanAborted will
change to True while MC_MoveVelocity_0 is aborted.
MC_MoveVelocity_1 will decelerate the axis to the velocity 300. When 300 is reached, InVelocity will change to
True and remain in this status as long as the velocity is not changed.
When Execute of MC_MoveVelocity_0 changes to False, CommanAborted will change to False.
If MC_MoveVelocity_0 is restarted by Execute, which changes to True, the axis will abort MC_MoveVelocity_1
and accelerate toward the velocity 500.
Before the axis reaches the target velocity of MC_MoveVelocity_0, Execute of MC_MoveVelocity_1 will again turn
False to True and aborts MC_MoveVelocity_0. In this case, the axis decelerates again without reaching the target
velocity.
 Loading...
Loading...

