AX-Series Motion Controller Instructions Manual Chapter 2
81
Name Function Data Type
Setting Value
Timing to Take Effect
Master
Specifies the
master axis
AXIS_REF_SM3* AXIS_REF_SM3
When Execute turns to True and Busy is
False.
Slave
Specifies the
slave axis
number.
AXIS_REF_SM3* AXIS_REF_SM3
When Execute turns to True and Busy is
False.
*Note: AXIS_REF_SM3(FB): Every function block contains this variable, which works as the starting program for function blocks.
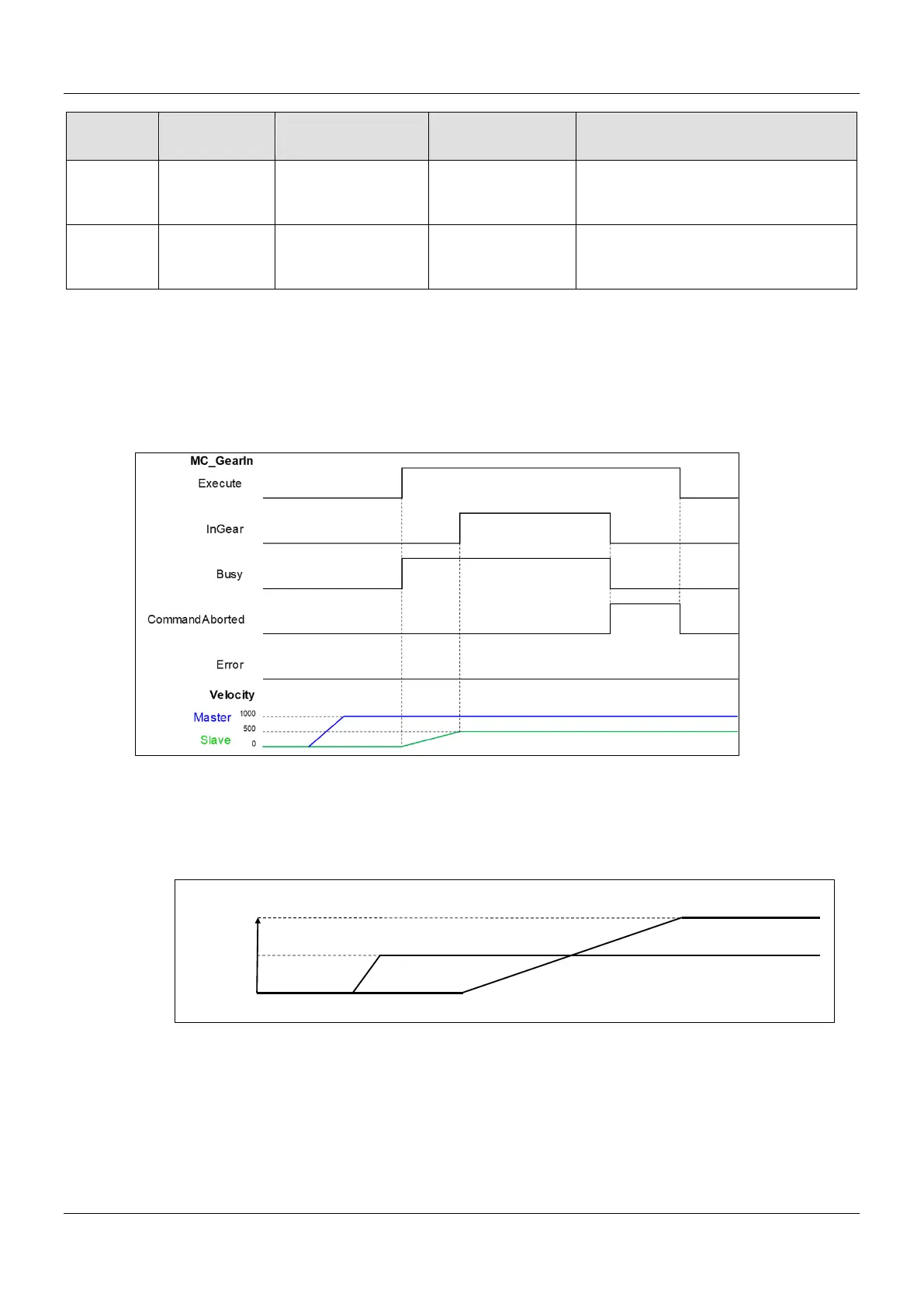
Function
In MC_GearIn, slave axis will follow master axis to move at the Set Position.
When Execute is True, The target speed of slave axis is the velocity of master axis times gear ratio (Velocity*
RatioNumerator/ RatioDenominator)
After the gear relation is established, slave axis will follow master axis to move at the given proportional relationship
to accomplish the synchronized control of master and slave axis. Master and slave axis could be real or virtual axis
or the external encoder master axis.
RatioNumerator, RatioDenominator
When the value of gear ratio is positive, the master and slave axis move in same direction.
When the value of gear ratio is negative, the master and slave axis move in opposite direction.
Ratio Numerator: Ratio Denominator = 2:1
 Loading...
Loading...

