120
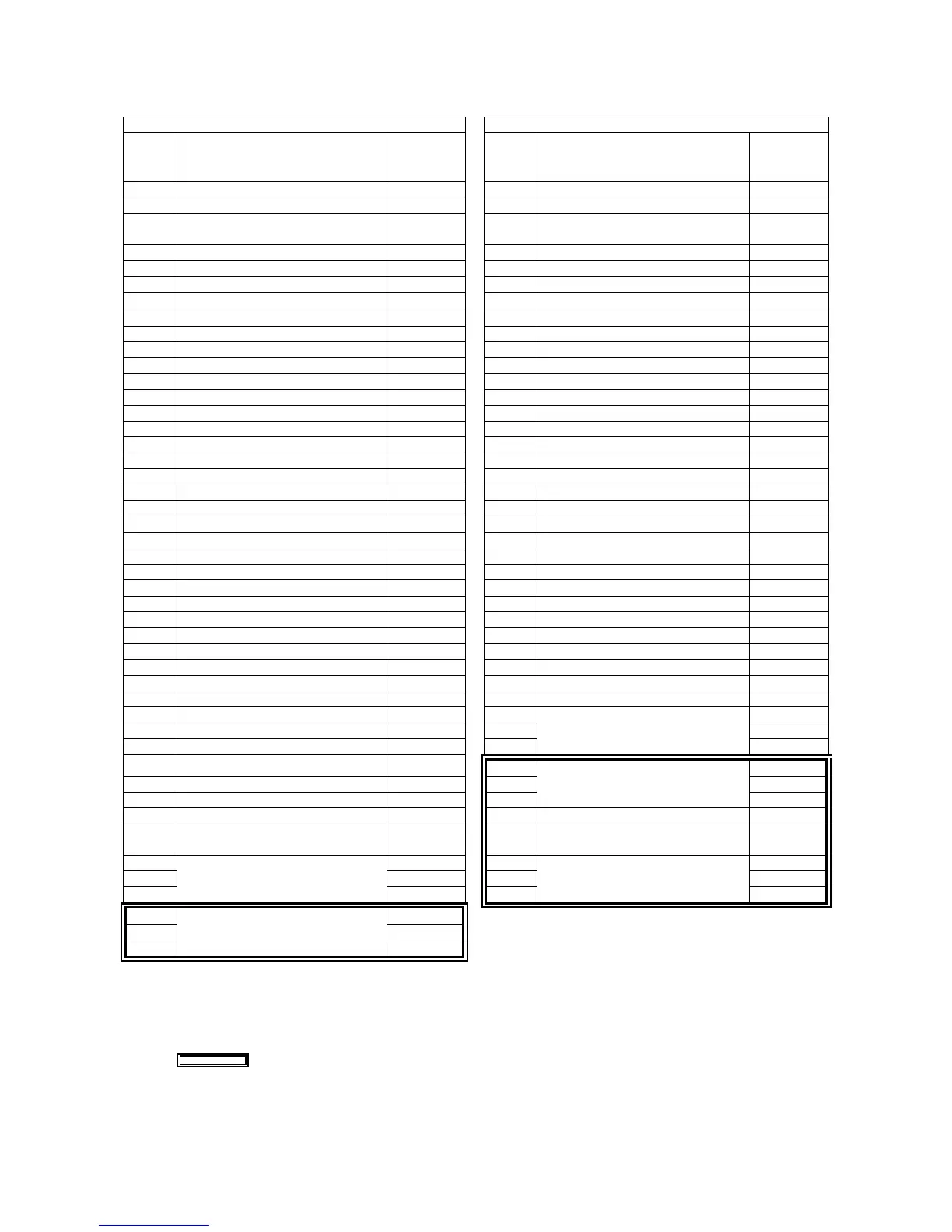
7.5.15 CC-Link Board (2 stations occupied) in Standard Mode
Input data Output data
Port
No.
Signal name
Remote
output
(Note 1)
Port
No.
Signal name
Remote
input
(Note 1)
512
Step Stop (All tasks)
RYn0 768 Reserved. RXn0
513 Reserved. RYn1 769
Robot Running
RXn1
514
Instantaneous Stop (All tasks)
[Halt]
RYn2 770
Robot Error
RXn2
515
Strobe Signal
RYn3 771
Servo ON
RXn3
516
Interruption Skip
RYn4 772
Robot Initialized
RXn4
517
⎯
RYn5 773
Auto Mode
RXn5
518
⎯
RYn6 774
External Mode
RXn6
519 Command data area odd parity RYn7 775
Battery Warning
RXn7
520 Data area 1 bit 0 RYn8 776
Robot Warning
RXn8
521 Data area 1 bit 1 RYn9 777
Continue Start Permission
RXn9
522 Data area 1 bit 2 RYnA 778
SS Mode
RXnA
523 Data area 1 bit 3 RYnB 779 Reserved. RXnB
524 Data area 1 bit 4 RYnC 780 Reserved. RXnC
525 Data area 1 bit 5 RYnD 781 Reserved. RXnD
526 Data area 1 bit 6 RYnE 782
Command Processing Completed
RXnE
527 Data area 1 bit 7 RYnF 783 Status area odd parity RXnF
528 Data area 2 bit 0 RY(n+1)0 784 Status area bit 0 RX(n+1)0
529 Data area 2 bit 1 RY(n+1)1 785 Status area bit 1 RX(n+1)1
530 Data area 2 bit 2 RY(n+1)2 786 Status area bit 2 RX(n+1)2
531 Data area 2 bit 3 RY(n+1)3 787 Status area bit 3 RX(n+1)3
532 Data area 2 bit 4 RY(n+1)4 788 Status area bit 4 RX(n+1)4
533 Data area 2 bit 5 RY(n+1)5 789 Status area bit 5 RX(n+1)5
534 Data area 2 bit 6 RY(n+1)6 790 Status area bit 6 RX(n+1)6
535 Data area 2 bit 7 RY(n+1)7 791 Status area bit 7 RX(n+1)7
536 Data area 2 bit 8 RY(n+1)8 792 Status area bit 8 RX(n+1)8
537 Data area 2 bit 9 RY(n+1)9 793 Status area bit 9 RX(n+1)9
538 Data area 2 bit 10 RY(n+1)A 794 Status area bit 10 RX(n+1)A
539 Data area 2 bit 11 RY(n+1)B 795 Status area bit 11 RX(n+1)B
540 Data area 2 bit 12 RY(n+1)C 796 Status area bit 12 RX(n+1)C
541 Data area 2 bit 13 RY(n+1)D 797 Status area bit 13 RX(n+1)D
542 Data area 2 bit 14 RY(n+1)E 798 Status area bit 14 RX(n+1)E
543 Data area 2 bit 15 RY(n+1)F 799 Status area bit 15 RX(n+1)F
544 Command area bit 0 RY(n+2)0 800 RX(n+2)0
545 Command area bit 1 RY(n+2)1 : :
546 Command area bit 2 RY(n+2)2 815
User output (OUTPUT m)
(Note 2)
RX(n+2)F
547 Command area bit 3 RY(n+2)3 816 RX(n+3)0
548 Reserved. RY(n+2)4 : :
549 Reserved. RY(n+2)5 825
Not used.
RX(n+3)9
550 Reserved. RY(n+2)6 826 Error status flag (Note 3) RX(n+3)A
551 Reserved. RY(n+2)7 827
Remote station ready
(Note 4)
RX(n+3)B
552 RY(n+2)8 828 RX(n+3)C
: : : :
559
User input (INPUT m)
(Note 2)
RY(n+2)F 829
Not used.
RX(n+3)F
560 RY(n+3)0
: :
575
Not used.
RY(n+3)F
Note 1: n denotes (station number − 1) × 2 (hexadecimal notation).
Note 2: m denotes I/O port number.
Note 3: The output timing is the same as that of Robot Error (I/O port #770) and Robot Warning (I/O port #776).
Note 4: The output timing is the same as that of Robot Initialized (I/O port #772).
Note 5:
indicates the system area that cannot be used for user I/O.