31
3.3 Types and Functions of System Input Signals
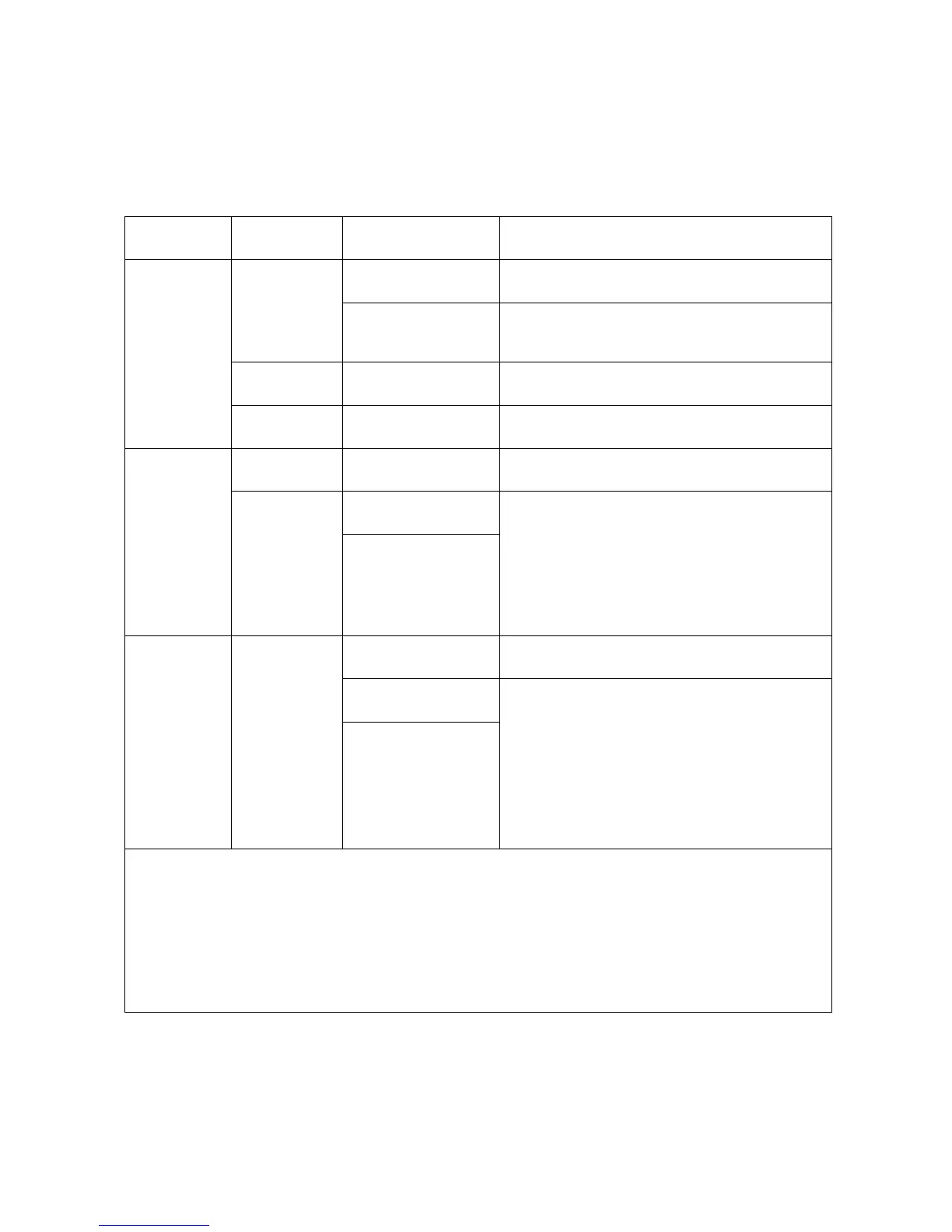
The table below lists the system input signals.
Types and Functions of System Input Signals
Use to:
Applicable
controller type
Signal name Function
Step Stop (All tasks)
Releasing the signal step-stops all programs
being executed.
Any type
Instantaneous Stop
(All tasks)
(Note 2)
Releasing this signal instantaneously stops all
programs being executed.
Standard type External Emergency
Stop (dual line)
Releasing this signal stops the robot in an
emergency.
Stop
(Note 1)
Global type External Emergency
Stop (dual line)
Releasing this signal stops the robot in an
emergency.
Standard type Enable Auto Short-circuiting this signal enables switching to
Auto mode.
Enable Auto
(dual line)
Select mode
Global type
Protective Stop
(dual line)
Short-circuiting this signal enables switching to
Auto mode.
The Enable Auto and Protective Stop input
signal circuits are connected in series in the
controller, so two types of inputs are available
as an automatic operation permission signal.
Strobe Signal This signal initiates the processing of the I/O
commands set in the data and command areas.
Data areas
(3 bits)
Prepare for
operation
Start program
Clear error
Any type
Command areas
(3 bits)
These areas are used to specify I/O commands
that enable the following:
- Start/stop each task program.
- Prepare for operation
- Clear robot errors.
Note: For details, refer to Section 3.5.3 "I/O
Commands Details
(Note 1) In External automatic operation, be careful with the following:
- The moment each of these signals is released, the corresponding stop processing starts.
- As long as it is not necessary to stop the robot, these stop signals should be short-circuited.
(Note 2)
The Instantaneous Stop signal becomes available only when an I/O extension board is used and the
allocation mode is changed to Standard or Compatible mode. Like other stop signals, this signal should be
short-circuited as long as it is not necessary to stop the robot.