41
3.5.3 I/O Commands Details
3.5.3.1 List of I/O Commands
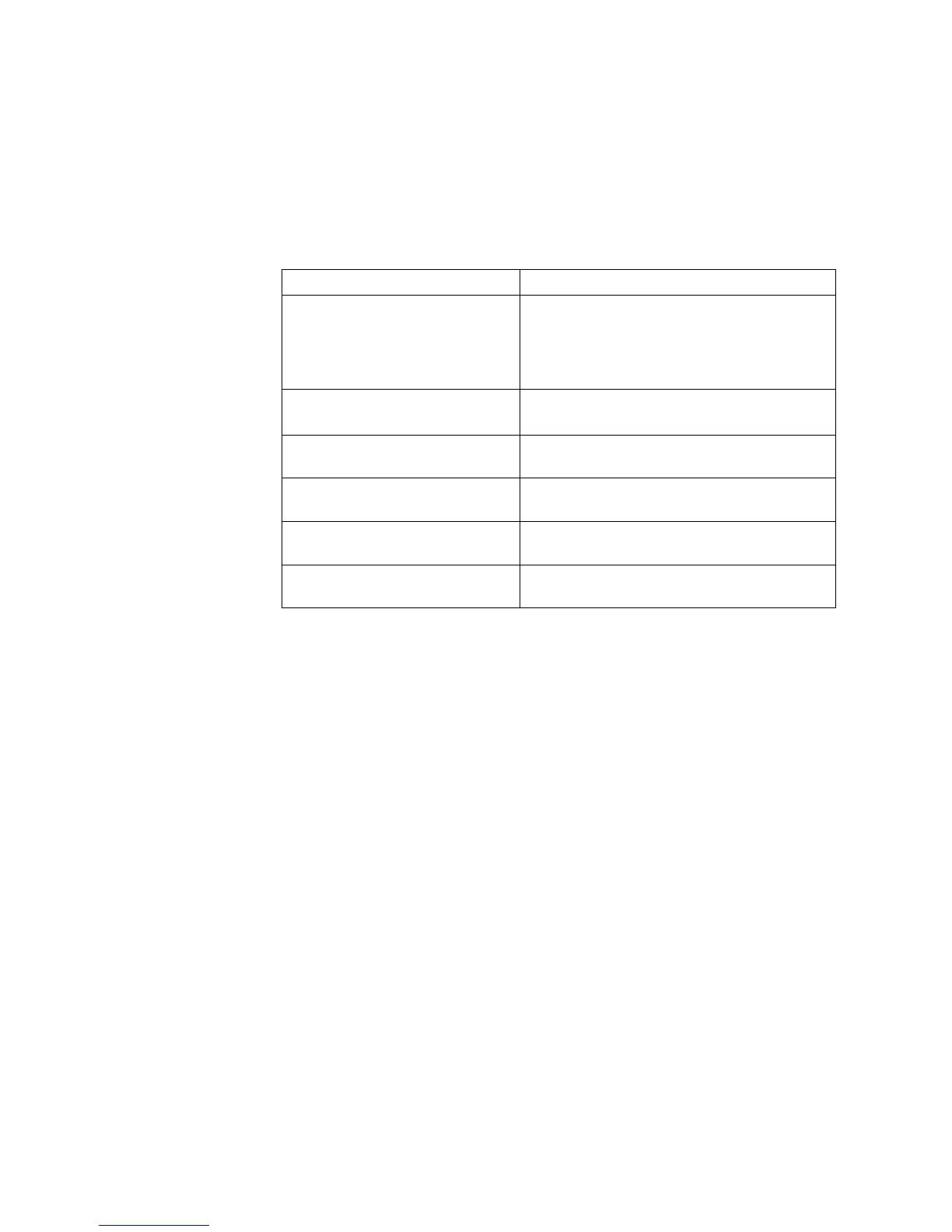
The table below lists I/O commands.
List of I/O Commands
Command area Data area
000
Operation Preparation
001 Motor Power ON, CAL Execution
010 External speed 100
100 External Mode switching
111 Execution of all above
(Motor Power
ON→CAL→SP100→External)
001
Clear Robot Error
⎯
010
Program Start
Program number
011
Continue Start
⎯
100
Specified Program Reset
Program number
101
All Programs Reset
⎯
3.5.3.2 OPERATION PREPARATION (000)
(1) Function
Prepares to operate the robot by switching the operation mode from the
external devices.
(2) Format
Command area (3 bits, input)
000
Data area (3 bits, input)
0 bit: Motor Power ON, CAL Execution
1 bit: External speed 100
2 bit: External mode switching
These bits can be set at the same time and can be executed. If plural bits are
set, the commands are executed in order.
For example: If the 0 bit, 1 bit and 2 bit are set, commands are executed as
follows;
Motor Power ON, CAL Execution, External speed 100 and External mode
switching
(3) Description
This command can be executed in Auto mode. In other modes, an error
occurs at execution. When executing this command, select the Internal auto
mode on the teach pendant or mini-pendant beforehand.