16
Chapter 3 System I/O Signals
3.1 Types and Functions of System Output Signals
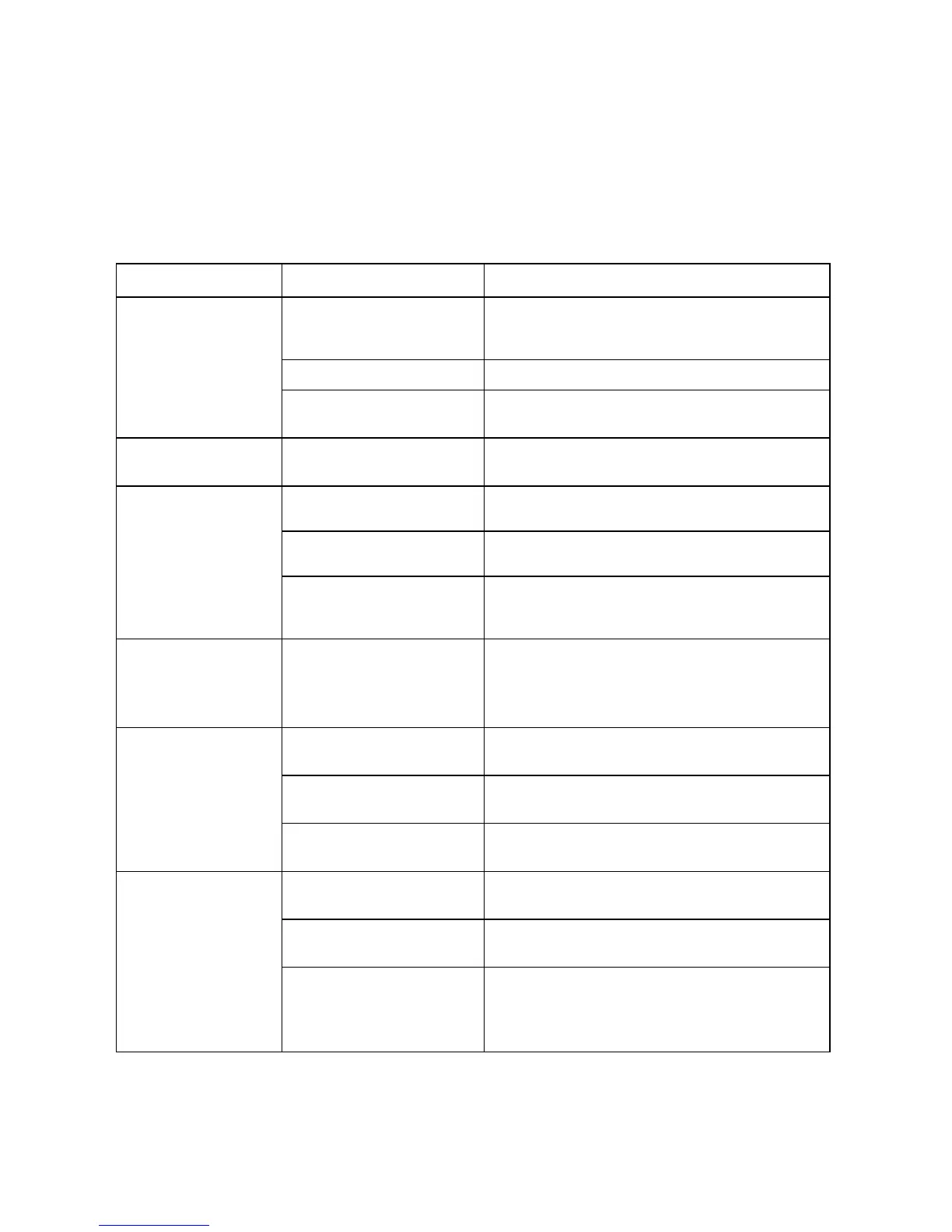
The table below lists the system output signals.
Types and Functions of System Output Signals
Application Output signal name Function
Robot Initialized
Outputs to the external device that the
OPERATION PREPARATION command is
executable.
Auto Mode Outputs when the robot is in Auto mode.
Start-up
Operation Preparation
Completed
Outputs when the motor power is turned on and the
robot is in External auto mode.
Program execution Robot Running
Outputs when the robot is in operation (one or
more tasks are being executed).
CPU Normal
Outputs when the CPU of the robot controller is
normal.
Robot Error
Outputs when a servo error, program error, or any
other serious error occurs.
Error/Warning
Battery Warning
Outputs when the voltage of the encoder or
memory backup battery drops below the specified
level.
Continue
Continue Start Permission
Note: It is necessary to specify
this output signal by I/O
hardware setting beforehand.
Outputs when Continue Start is permitted.
Emergency Stop
(dual line)
Outputs when the robot is emergency-stopped.
Pendant Emergency Stop
(dual line)
Outputs the status of the emergency stop button
on the teach pendant or mini-pendant.
Emergency stop circuit
(Standard type of
controller)
Deadman SW [Enable SW]
(dual line)
Outputs the status of the deadman switch (enable
switch) on the teach pendant or mini-pendant.
Pendant Emergency Stop
(dual line)
Outputs the status of the emergency stop button
on the teach pendant or mini-pendant.
Deadman SW [Enable SW]
(dual line)
Outputs the status of the deadman switch (enable
switch) on the teach pendant or mini-pendant.
Safety circuit
(Global type of
controller)
Contactor Contact Monitor
Outputs the status of the auxiliary contact of the
motor contactor in the robot controller.
This signal comes on when the motor is turned on;
it comes off when the motor is turned off.