32
3.4 Usage of System Input Signals
The usage of each system input signal is described below.
3.4.1 Step Stop (All tasks) (input)
(1) Function
This signal allows the external device to step-stop all tasks being executed,
except supervisory tasks.
(2) Terminal
#11 on connector CN5
(3) Input conditions and operation
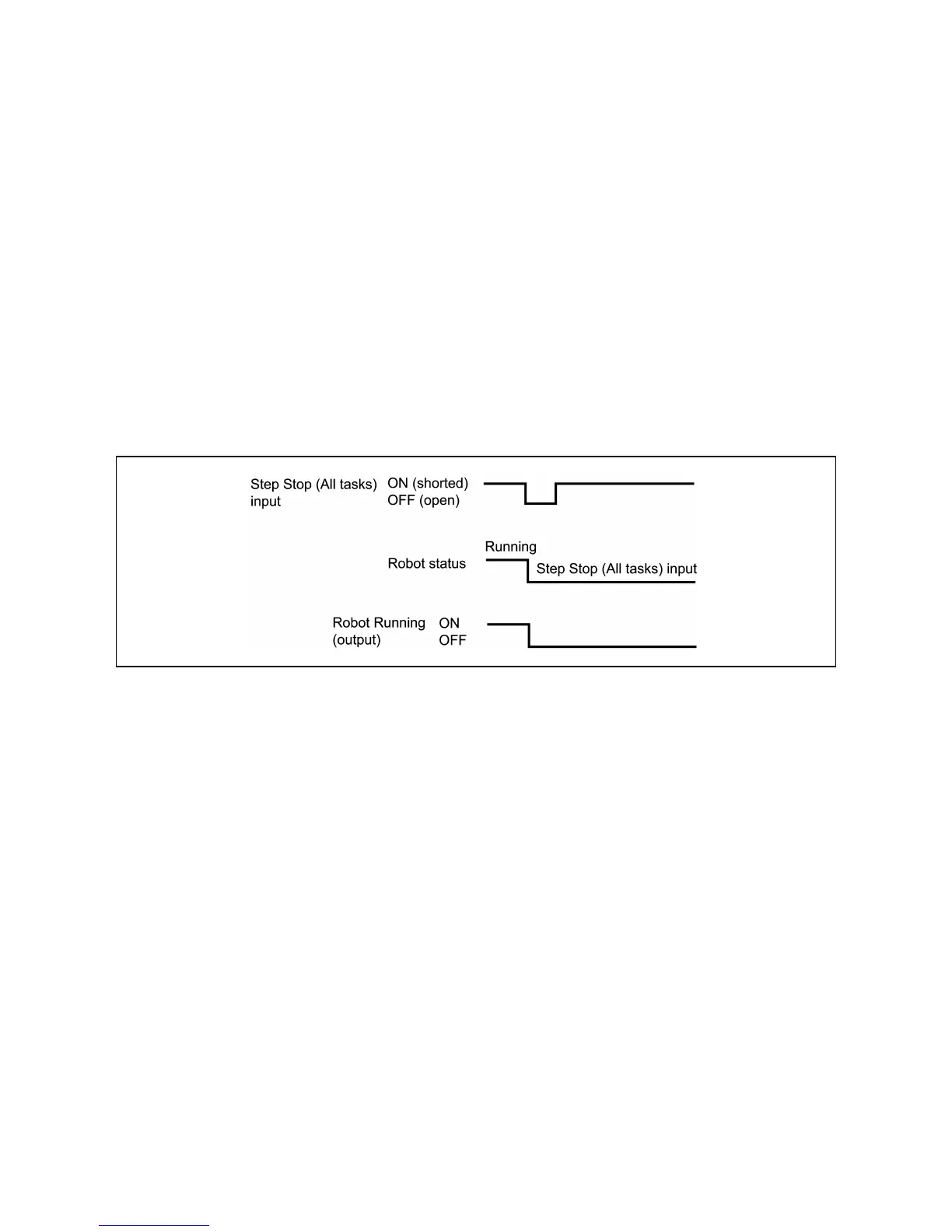
(a) Turning (opening) this signal OFF stops all tasks upon completion of the
on-going step and turns OFF the Robot Running output signal.
(b) For resuming the program after a step stop, see Chapter 3, Section
3.5.3.2 "OPERATION PREPARATION (000)."
Step Stop (All tasks) Input