71
5.2.2 User-Input, System-Input and Hand-Input Circuits (PNP type)
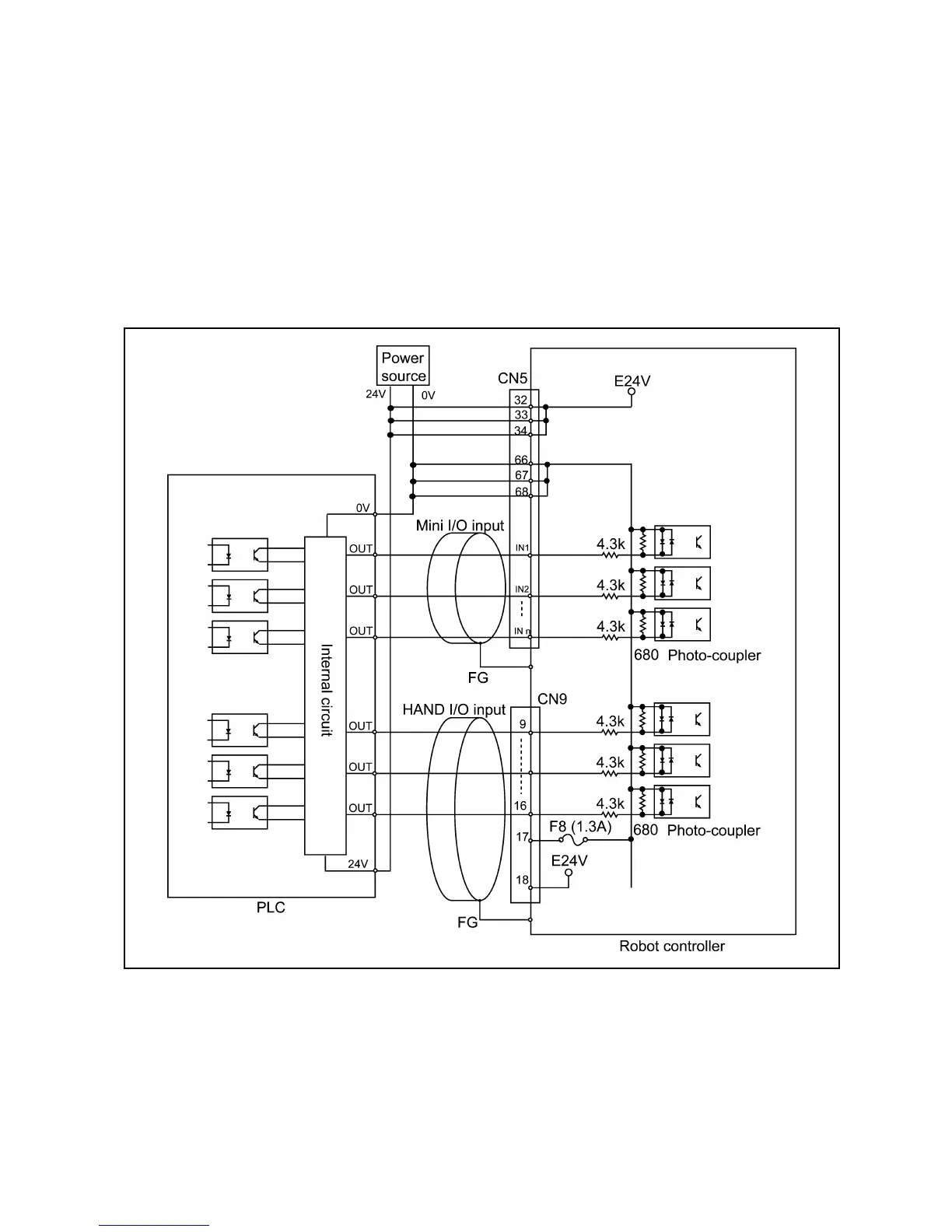
The figure below shows examples of the user-input, system-input and hand-input circuit
configurations and connections of the robot controller.
Notes
(1) In addition to PLCs, proximity switches and relay contacts can be directly
connected to the input terminals of the robot controller. Note that the leakage
current from the proximity switches should be 1 mA or below.
(2) Use multi-core shielding cables for protecting the controller from external noise and
ground them at the controller side.
(When the external power source is used)
User-Input, System-Input and Hand-Input Circuits (PNP type)