13
2.1.2 Types of System I/O Signals (Global type of controller)
The global type of the controller concentrates emergency stop related system I/Os on
the safety I/O (CN10), so it does not use the Mini I/O (CN5). (Refer to Sections 4.1.3,
4.1.4, 5.1.3, and 5.1.4.)
It issues PROGRAM START commands as I/O commands by using seven command
execution inputs.
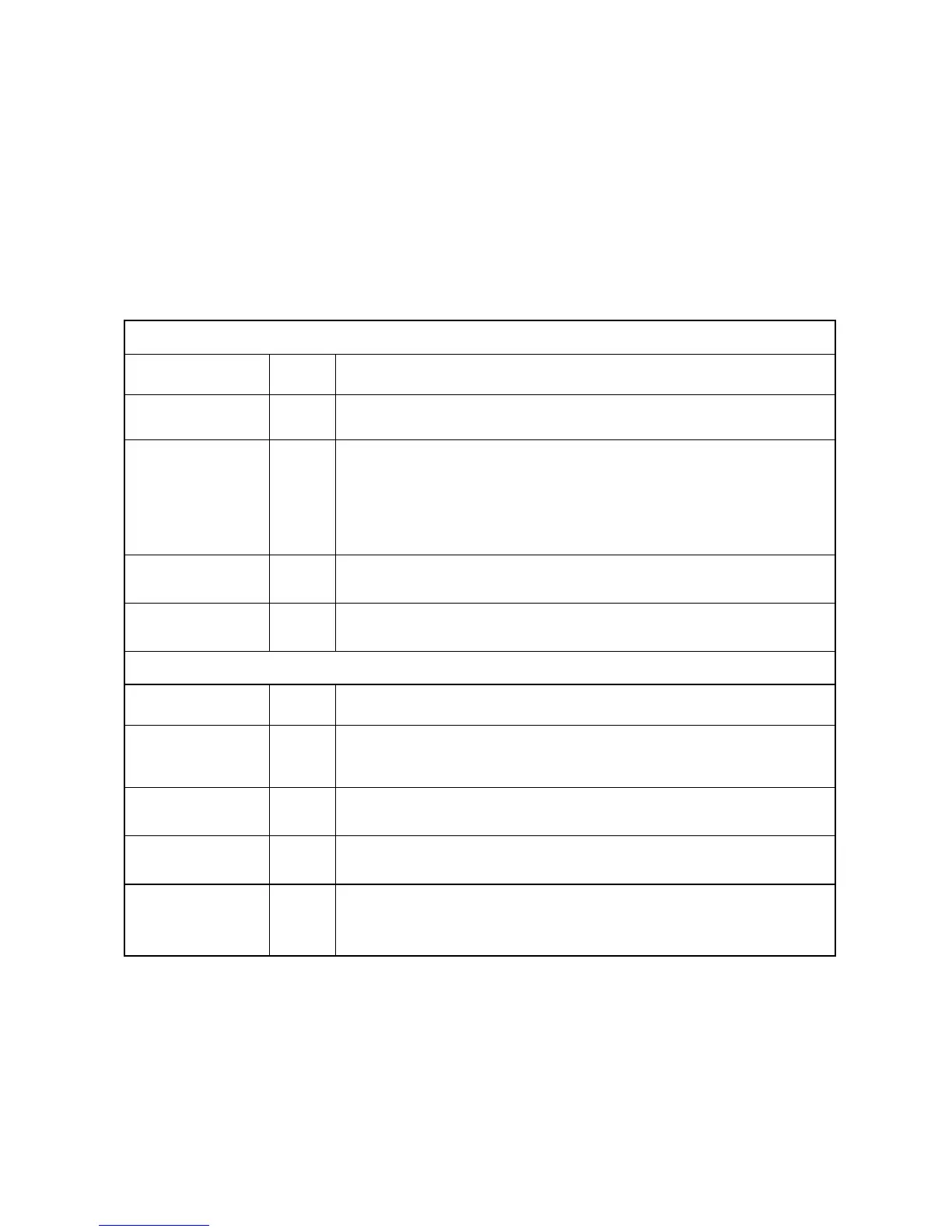
The table below lists the types of system I/O signals.
Types of System I/O Signals (Global type of controller)
Fixed by system
Type
No. of
points
Function
System input 7
External Emergency Stop 1, External Emergency Stop 2, Enable Auto 1,
Enable Auto 2, Step Stop (All tasks), Protective Stop 1, Protective Stop 2
System output
12
(Note)
Auto Mode, Robot Initialized, Robot Running, CPU Normal,
Robot Error, Operation Preparation Completed, Battery Warning,
Pendant Emergency Stop 1, Pendant Emergency Stop 2,
Deadman SW 1 [Enable SW 1], Deadman SW 2 [Enable SW 2],
Contactor Contact Monitor, Continue Start Permission (selectable by I/O
hardware setting) (Note)
Input for command
execution
7 Command (3 bits), data area (3 bits), and Strobe Signal
Output for command
execution
1 Command Processing Completed
Controlled by user program
Type
No. of
points
Function
User input 8
Inputs to read the external I/O status with an IN command or IO [ ] variable.
Used for analysis condition identification, condition satisfaction wait, data
input from the external device, etc.
User output
7
(Note)
Outputs to issue a signal to the external device during program execution
with SET and RESET commands, etc.
HAND input 8
Inputs to read the external I/O status with an IN command or IO [ ] variable.
Used for checking the hand status.
HAND output 8
Outputs to issue signals to the external devices with SET and RESET
commands, etc.
Used for controlling the hand to open or close.
Note: Terminal #53 on CN5 (port 24) is assigned a user output by factory default. It can be assigned the
Continue Start Permission output signal with the I/O hardware setting.