—————— TPD32-EV ——————
166
6.7 SPEED REGULATION (SPEED REGULAT)
Speed Adaptive
and
Speed zero logic
+
+
+
+
+
DV_Srpi
DV_J_comp
DV_Droop_cp
+
+
DV_Spd_fbk
DV_Adp_spd
Speed P/I base
Speed fbk
T
DV_Curr_reg
F
T
+
+
Zero
+
+
Speed Reg P/I
To Current regulator
Load comp
T
Zero torque
Command
P/I regulator includes
anti-windup logic
Speed up
Inertia/Loss comp
Speed droop comp
Speed Limits
F
T current ref 2
0%
T current ref 1
0%
Speed reg output
Speed ref 1
0 rpm
Speed ref 2
0 rpm
Speed ref (d)
Actual spd (rpm)
Speed up gain
0%
Speed up filter
0ms
Speed up base
1000 ms
SpeedPin use
Speed Iin use
Speed P
5%
Speed I
0.5 %
Prop. filter
0ms
Lock speed I
Not Active
SpeedPbase
1.536 A/rpm
Speed I base
0.048 A/rpm*ms
Aux spd fun sel
Speed min pos
0 rpm
Speed min neg
0 rpm
Speed minamount
0 rpm
Speed max pos
1750 rpm
Speed max neg
1750 rpm
Speed maxamount
1750 rpm
T current ref
Lock speed reg Enable spd reg
SpeedPbypass
10 %
Speed I bypass
1%
Zero torque
Aux spd fun sel
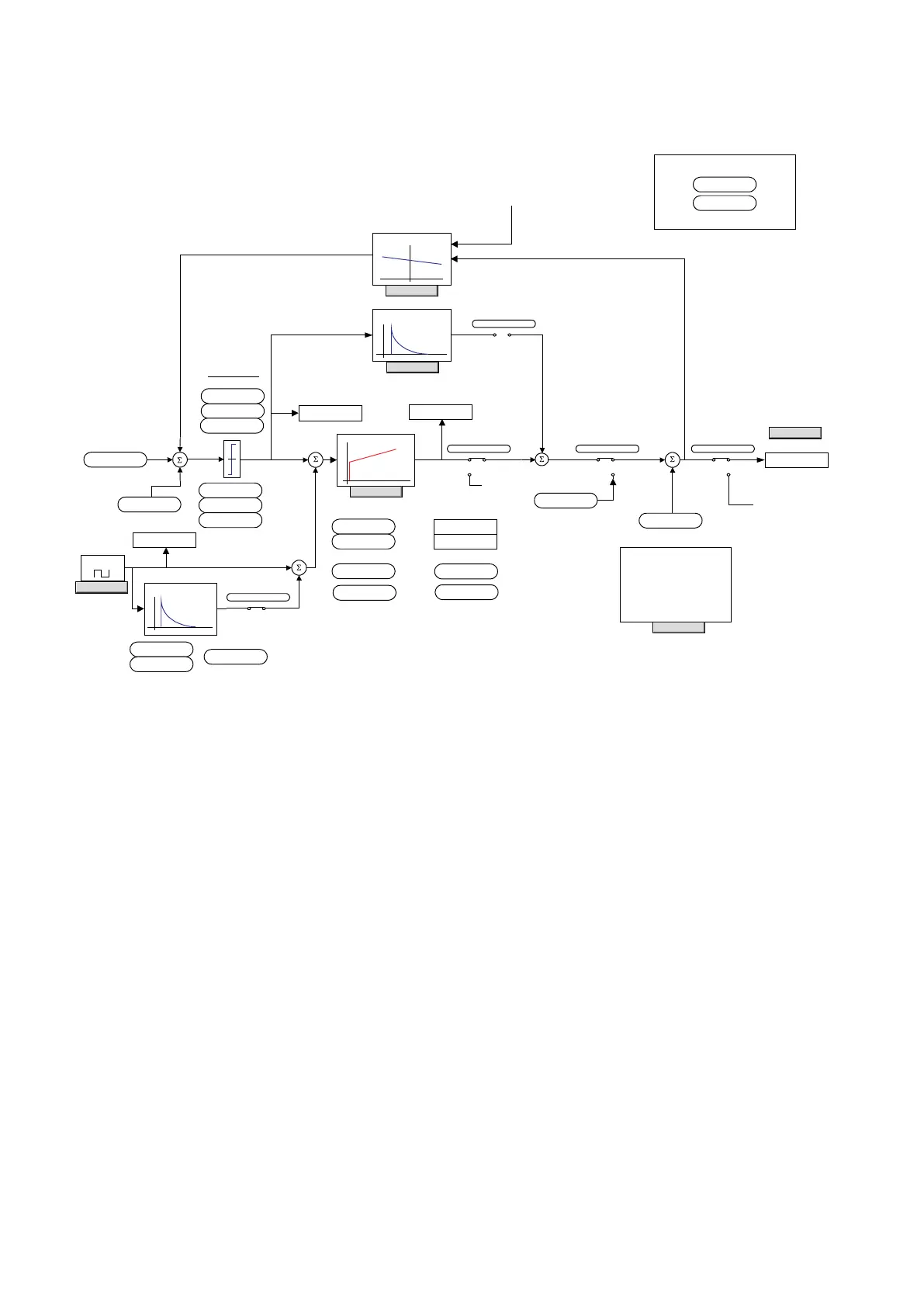
Figure 6.7.1: Speed regulation
TheconvertersoftheTPD32-EVseriesareprovidedwithaspeedregulatorcircuitthatcanadaptexiblytothe
requirementsofvariousapplications.ThedeviceisfactorysetforPIregulationandregulatorparametersthat
staythesamethroughouttheentirespeedrange.
Thefollowingfunctionsarealsoprovided:
- “Speed-up”functioninordertoavoidoscillationsinpresenceofloadswithahighmomentofinertia.
- Speedzerologicforregulatorbehaviorwhenthemotorisstopped.
- Speedregulatoradaptionforoptimizingtheregulatoraccordingtotheactualspeedortoanexternalrefer-
ence(AdapReference)..
- Autocapturefunctionofarunningmotor
- Speedsignals
- Droopfunctionforcurrentbalancing
ForthespeedPIregulatordiagramblock,pleasereferto“SpeedregulatorPIpart”blockdiagramonchapter9.