—————— Instruction manual ——————
225
Adap P gain 2 ProportionalgainfortherangefromAdap speed 1 to Adap speed 2.Denedasa
percentageofSpeed P base.
Adap I gain 2 IntegralgainfortherangefromAdap speed 1 to Adap speed 2.Denedasapercent-
ageofSpeed I base.
Adap P gain 3 ProportionalgainfortherangeaboveAdap speed 2.DenedasapercentageofSpeed
P base.
Adap I gain 3 IntegralgainfortherangeaboveAdap speed 2.DenedasapercentageofSpeed I base.
Adap P gain 4 ProportionalgainfortherangeaboveAdap speed 3.DenedasapercentageofSpeed
P base.
Adap I gain 4 IntegralgainfortherangeaboveAdap speed 3.DenedasapercentageofSpeed I base.
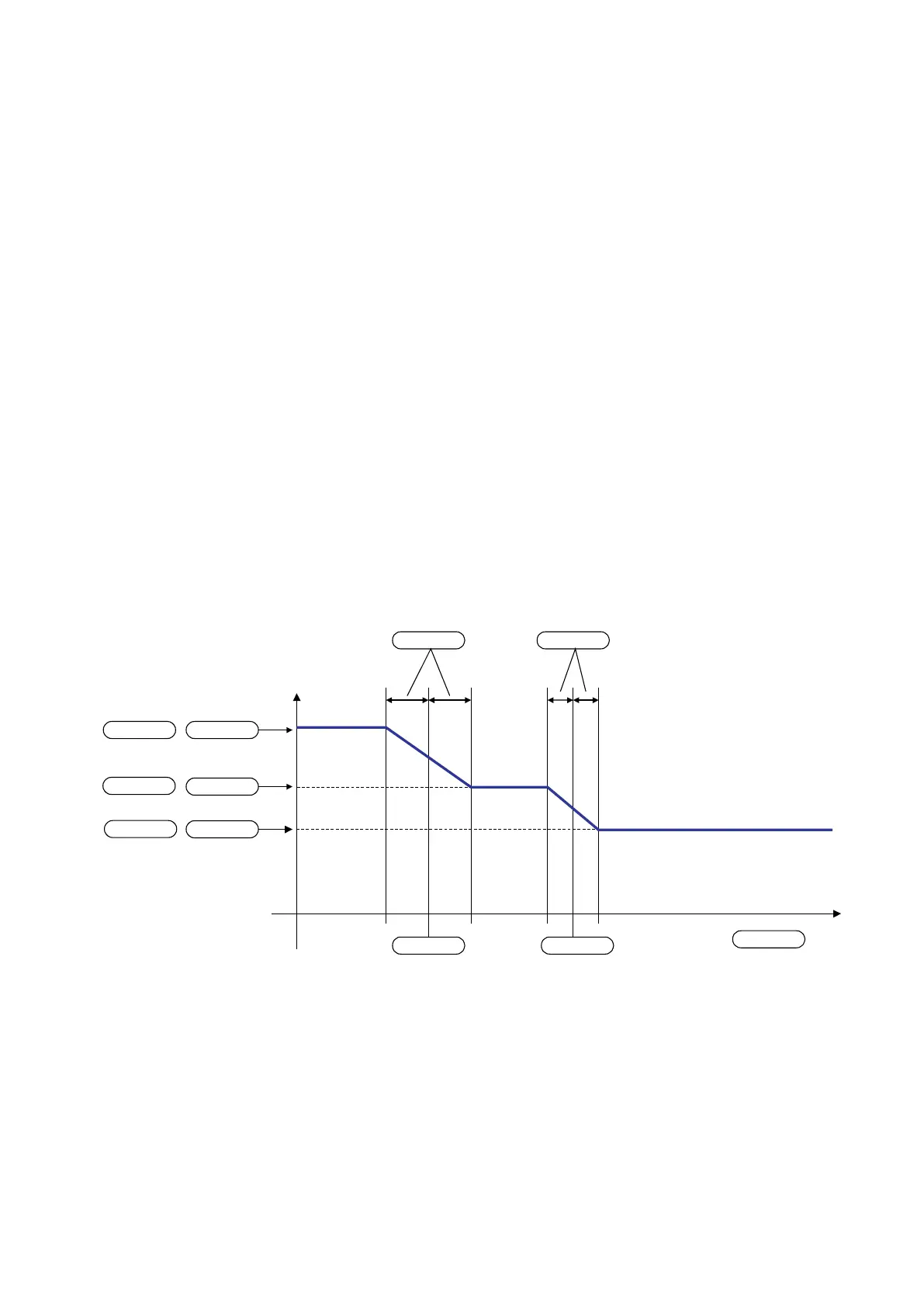
InordertoactivateAdaptivespeedregulation,thefunctionmustbeenabledwiththeEnable spd adapparameter.
Normallythegaindependsonthespeedofthedrive.Itcan,however,alsovaryaccordingtoanothervariable,
denedbytheAdap reference parameter.ThismustbeselectedwiththeSelect adap typeparameter.
TheAdap speed 1andAdap speed 2parametersareusedtodenethethreerangesthatmayhavedifferent
gains.Aparametersetcanbedenedforeachoftheseranges,witheachsetcontaininganindividuallydenable
PandIcomponent.
TheAdap joint 1and Adap joint 2parametersensureasmoothtransitionbetweenthedifferentparametersets.
TheeldsmustbedenedsothatAdap joint 1andAdap joint 2donotoverlap.
WhentheAdaptivespeedregulationisenabled(Enable spd adap=Enabled)theSpeed PandSpeed Iparameters
havenoeffect.Theystillretaintheirvalueandareeffectiveafteranydisablingoftheadaptivespeedregulation.
Whenthedriveisnotenabled,thegainofthespeedregulatorisdeterminedbythezerospeedlogic.Seesection
6.7.2,“Zerospeedlogic”.
Adap P gain 1
10 %
Adap P gain 2
10 %
Adap P gain 3
10 %
Adap I gain 1
1%
Adap I gain 2
1%
Adap I gain 3
1%
Adap speed 1
20.3 %
Adap speed 2
40.7 %
Adap joint 1
6.1 %
Adap joint 2
6.1 %
Adap reference
1000 rpm
Figure 6.13.2.1: Adaptive of the speed regulator