—————— Instruction manual ——————
319
TheLINKsourcemustbeassociatedtoPI output PID[n
0
771]:
Source link 1=8192+771=8963
TheLINKdestinationmustbeassociatedtothevalueoftheintegralcomponent=parameterPI I gain PID[n
0
764]:
Destination link 1 =8192+764=8956
Themultiplierfactormustbesettothevaluedenedbythefunctioningtestsabovementioned.
Mul gain link 1 =40
Itwillbenecessarytoset:
Div gain link 1 =1000
*
Input max link 1=1000
*
Input min link 1=100
**
Input offset link 1=0
Output offset link 1=0
Input absolute link 1=OFF
*
Thevalue1000isdenedbyPI top limwhichwillbeinthiscase=1(correspondenttoamaximumvalue
of PI output PID=1000).
**
Thevalue100isdenedbyPI bottom limwhichwillbeinthiscase=0.1(correspondenttoaminimum
valueofPI output PID=100).
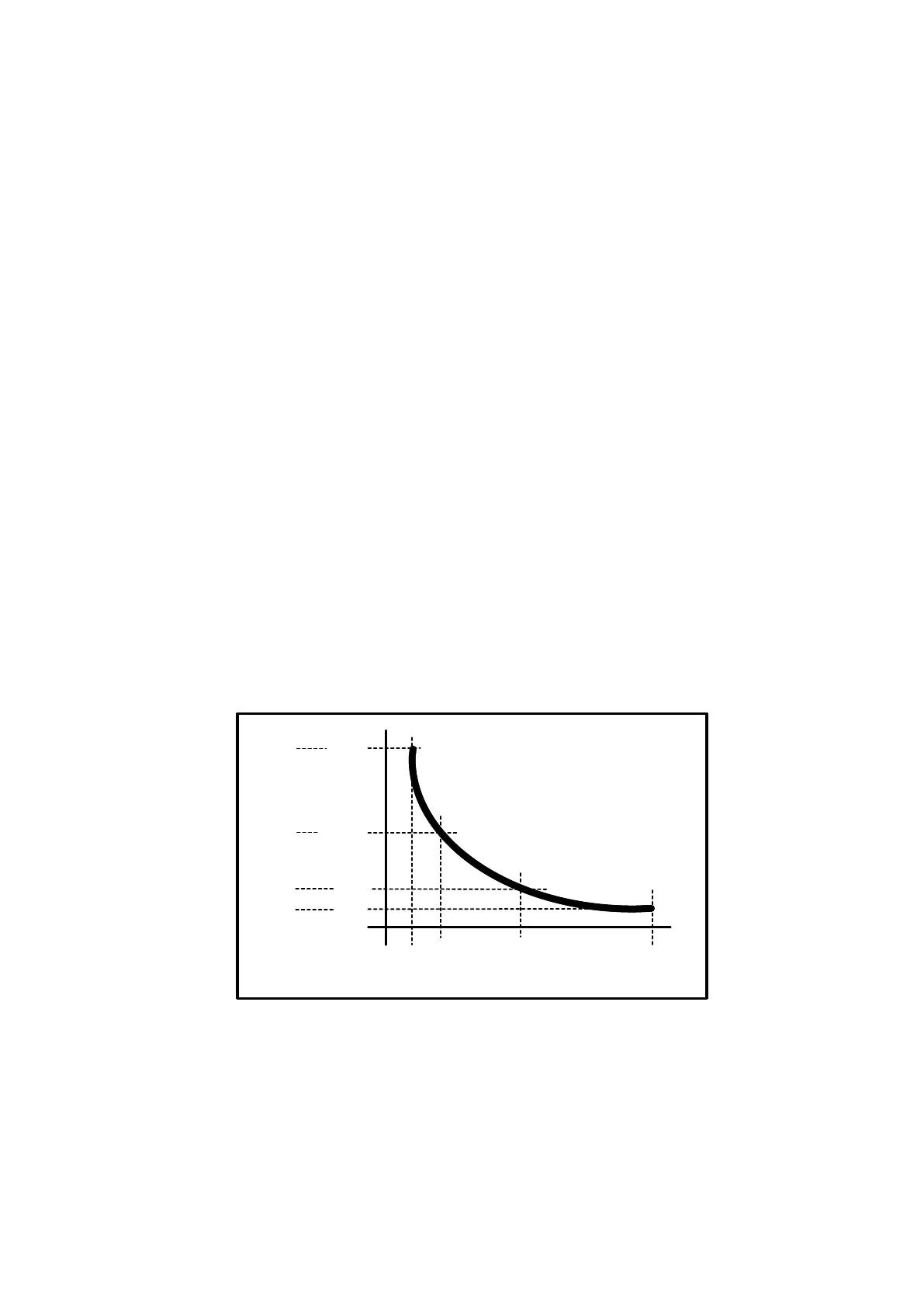
Withthiscongurationatminimumdiameteritwillcorrespondanintegralgain=40%andatmaximumdiameter
itwillcorrespondtoanintegralgain=4%,betweenthetwosetpointsthegainwillchangewithanhyperbolic
characteristic.
PI I gain PID
100
1000
PI output PID
40%
4%
max
20%
PIIgain PID =
(
att xKI)
[KI=40%]
o
100
1000
200
500
8%
500
200
Figure 6.16.3.16: Relation between PI I gain PID and PI I output PID
ThevalueofPI I gain PIDwillbedisplayedintherelativeparameterofthesubmenuPI controls.
Ifnecessary,usingtheLINK2,itispossibletomodify,dynamically,theproportionalgainP gain PID.

 Loading...
Loading...


