E1 Series Servo Drive User Manual Application Function
8-68 HIWIN MIKROSYSTEM CORP.
Description Figure
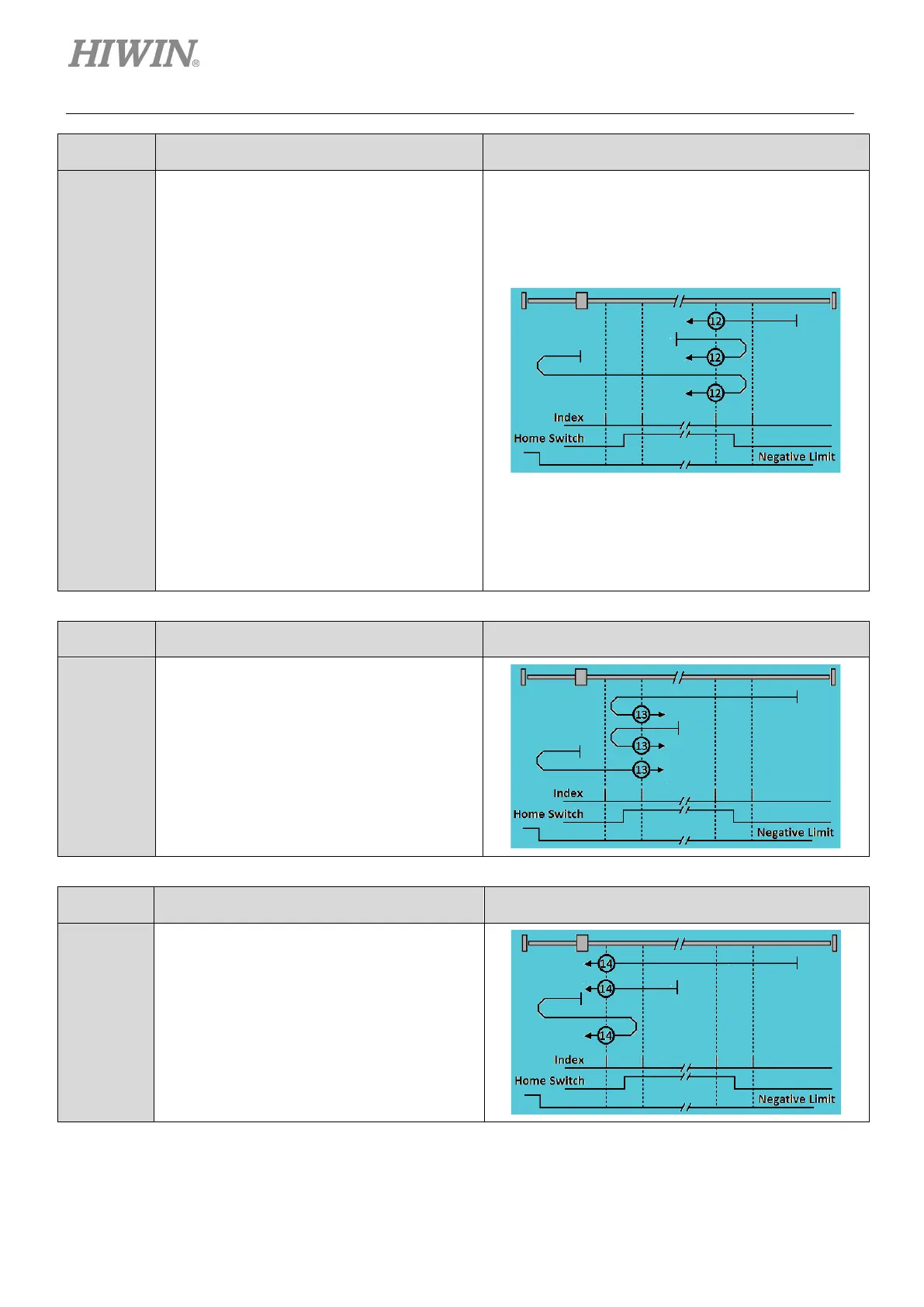
Pt700=12
Homing with the Z-phase signal on the left of
the rising edge of DOG signal from negative
direction.
(1) Outside DOG signal:
Search for the rising edge of DOG
signal in negative direction at the
velocity for finding near home sensor
(rotary servo motor) (Pt701). After the
rising edge of DOG signal is found,
search for the Z-phase signal on the left
of DOG signal in negative direction at
the velocity for finding home position
(rotary servo motor) (Pt702).
(2) Inside DOG signal:
Search for the falling
signal in positive direction at the velocity
for finding near home sensor (rotary
servo motor) (Pt701). After the falling
edge of DOG signal is found, search for
the Z-phase signal on the left of DOG
signal in negative direction at the
velocity for finding home position (rotary
Description Figure
Pt700=13
Homing with the Z-phase signal on the right
of the falling edge of DOG
negative direction. Search for the falling edge
of
DOG signal in negative direction at the
velocity for finding near home sensor (rotary
servo motor) (Pt701). After the falling edge of
DOG signal is found, search for the Z-phase
signal on the right of DOG signal in positive
direction at t
he velocity for finding home
position (rotary servo motor) (Pt702).
Description Figure
Pt700=14
Homing with the Z-phase signal on the left of
the falling edge of DOG signal from negative
direction. Search for the falling edge of DOG
signal in negative direction at the velocity for
finding near home sensor (rotary servo motor)
(Pt701). After the falling edge of DOG signal
is found, search for the Z-phase signal on the
left of DOG signal in negative direction at the
velocity for finding home position (rotary
servo motor) (Pt702).

 Loading...
Loading...


