E1 Series Servo Drive User Manual Parameters
HIWIN MIKROSYSTEM CORP. 15-9
Note:
The default value of Pt00A for Fieldbus servo drive is 1030.
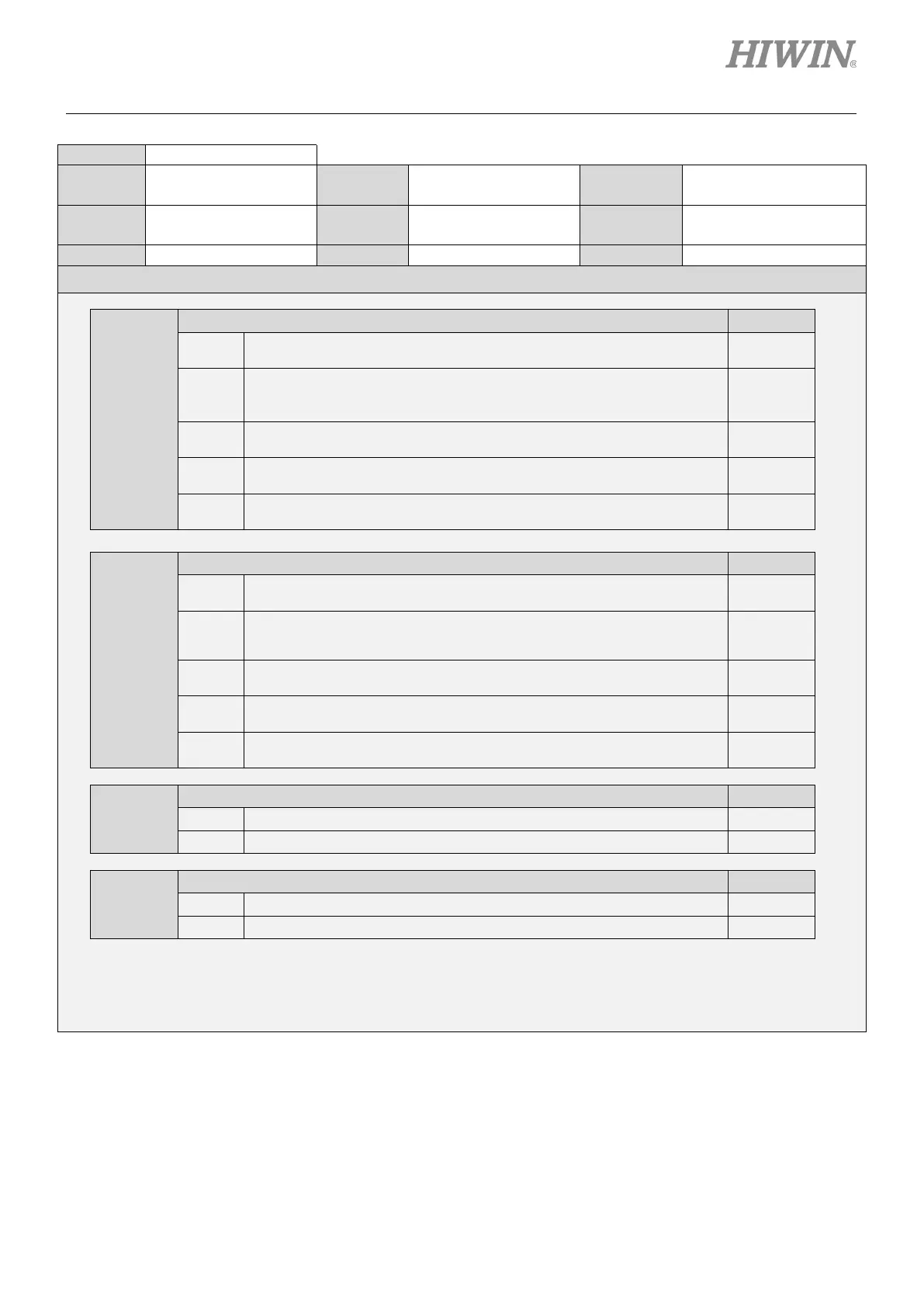
Size 2
0000~1144 Default 1000*
Name
Application function
selection A
Unit -
All
Description
t.X
Stopping method for Gr.B alarm Reference
0
Use dynamic brake to stop the motor or let the motor run freely until it stops.
The stopping method is the same as Pt001 = t.
-
1
Use the setting value of Pt406 as the maximum torque to decelerate the
motor to a stop. The motor state after the motor stops is set by Pt001 =
t.X.
-
2
Use the setting value of Pt406 as the maximum torque to decelerate the
motor to a stop. The motor runs freely afterwards.
-
3
Use the deceleration time set in Pt30A to decelerate the motor to a stop.
The motor state after the motor stops is set by Pt001 = t.
-
4
Use the deceleration time set in Pt30A to decelerate the motor to a stop.
The motor runs freely afterwards.
-
t.X
Stopping method for forced stop Reference
0
Use dynamic brake to stop the motor or let the motor run freely until it stops.
The stopping method is the same as Pt001 = t.
-
1
Use the setting value of Pt406 as the maximum torque to decelerate the
motor to a stop. The motor state after the motor stops is set by Pt001 =
-
2
Use the setting value of Pt406 as the maximum torque to decelerate the
motor to a stop. The motor runs freely afterwards.
-
3
Use the deceleration time set in Pt30A to decelerate the motor to a stop.
The motor state after the motor stops is set by Pt001 = t.
-
4
Use the deceleration time set in Pt30A to decelerate the motor to a stop.
The motor runs freely afterwards.
-
t.X
Excellent Smart Cube (ESC) for digital encoder ( Not supported in ED1□-□□-□□□□-A□) Reference
0 Do not use ESC-DN-XXX to read the digital encoder. -
1 Use ESC-DN-XXX to read the digital encoder. -
t.X
Multi-turn home position output (rotary motor) Reference
0 Do not use multi-turn home position output. -
1 Use multi-turn home position output. -

 Loading...
Loading...


