HD2 Series Inverter Basic Operation Guidelines
-97-
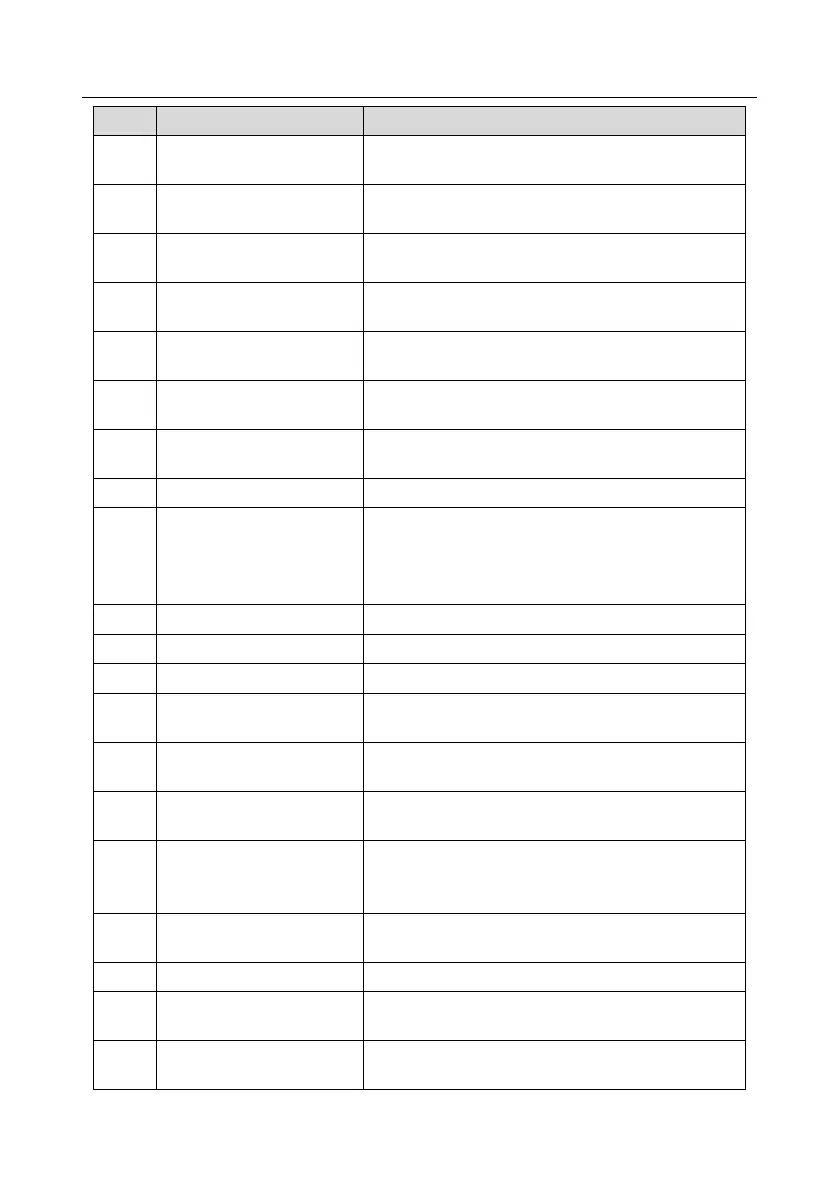
Switch position proportional
gains
Used to switch position proportional gains.
Enable cyclic digital
positioning
Cyclic positioning can be enabled when digital
positioning is valid.
When this command is valid, the motor decelerate to
emergency stop as per the time set by P01.26.
Motor overtemperature fault
input
Motor stops at motor over-temperature fault input.
Switch from FVC to SVPWM
control
When this terminal is valid in stop state, switch to
SVPWM control.
When this terminal is valid in stop state, switch to FVC
(closed-loop vector) control.
Switching the output polarity of PID, this terminal should
be used in conjunction with P09.03
When the thousands place of P21.00 is set to enable the
servo, the servo enabling terminal is valid, which controls
the inverter to enter zero servo control. At this situation,
no startup command is needed.
Max frequency limit on forward rotation
Max frequency limit on reverse rotation
Zero out the position counting value
When the terminal function is valid, the pulse input is
increased according to the P21.27 pulse speed.
Enable pulse superimposition
When the pulse superimposition is enabled, pulse
increase, and pulse decrease are effective.
When the terminal function is valid, the pulse input is
decreased according to the P21.27 pulse speed.
Electronic gear selection
If the terminal is valid, the proportional numerator is
switched to the P21.30 numerator of the 2
nd
command
ratio.
In stopped state, if the terminal is valid, the master is
used.
In stopped state, if the terminal is valid, the slave is used.
Used to reset the roll diameter when the tension control
function is enabled.
Used to switch winding/unwinding modes when the
tension control function is enabled.