B-6 Maxor Operator’s Manual www.javad.com
APPENDIX
Receiver Specifications
B
Status
Fix, Float, DOP, Data Link Status, Modem Latency,
Common
satellites, Percentage of fixing
Results RTK coordinates, HRMS, VRMS, Cov
ariance Matrix
Ambiguity fixing
level
Selectable thresholds
Lo
w: 95%; Medium: 99.5%; High: 99.9%
Measuring Modes
Base or Rover
Static
Kinematic (Stop and Go)
RTK (Real-time Kinematic)
DGPS (Differential GPS)
WASS/EGNOS DGPS
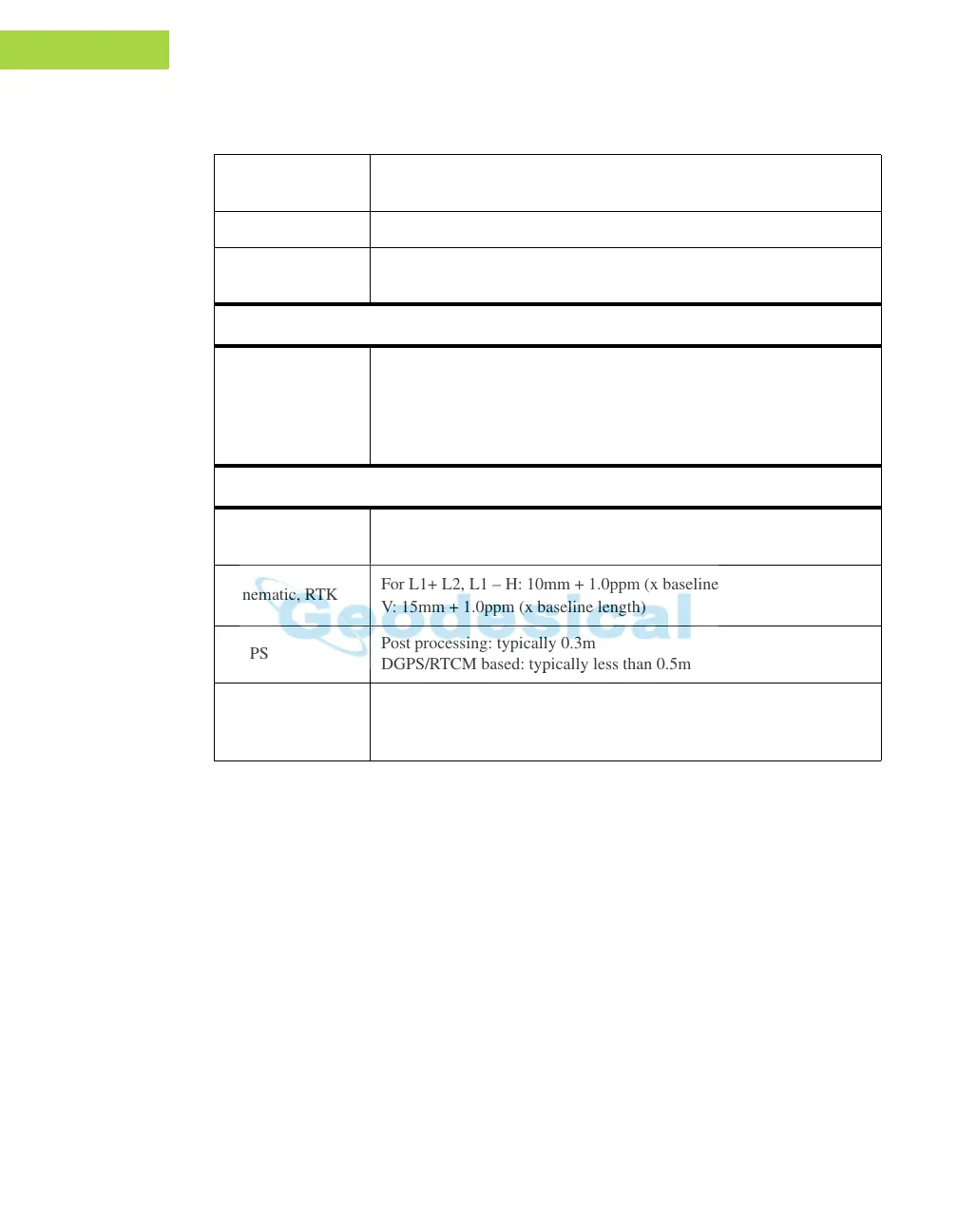
Measuring Accuracy
Static, Fast Static
For L1+L2 – H: 3mm + 0.5ppm (x baseline length);
V
: 5mm + 0.5ppm (x baseline length)
Kinematic, RTK
For L1+ L2, L1 – H: 10mm + 1.0ppm (x baseline length);
V: 15mm + 1.0ppm (x baseline length)
DGPS
Post processing: typically 0.3m
DGPS/RTCM based: typically less than 0.5m
Cold Start
Warm Start
Reacquisition
< 60 sec
< 10 sec
< 1 sec
Table B-1.
Receiver General Specifications (Continued)