Parameters
Operating manual for INVEOR α | DOC01539818 - 0004 | 2017-01 | V2.0 EN 61
Frequency setting mode:
The target values from the “target value source” (1.130) are rescaled into frequency target values.
0 % is the "minimum frequency" (1.020).
100 % is the "maximum frequency" (1.021).
The target value's plus or minus sign is the decisive factor in rescaling.
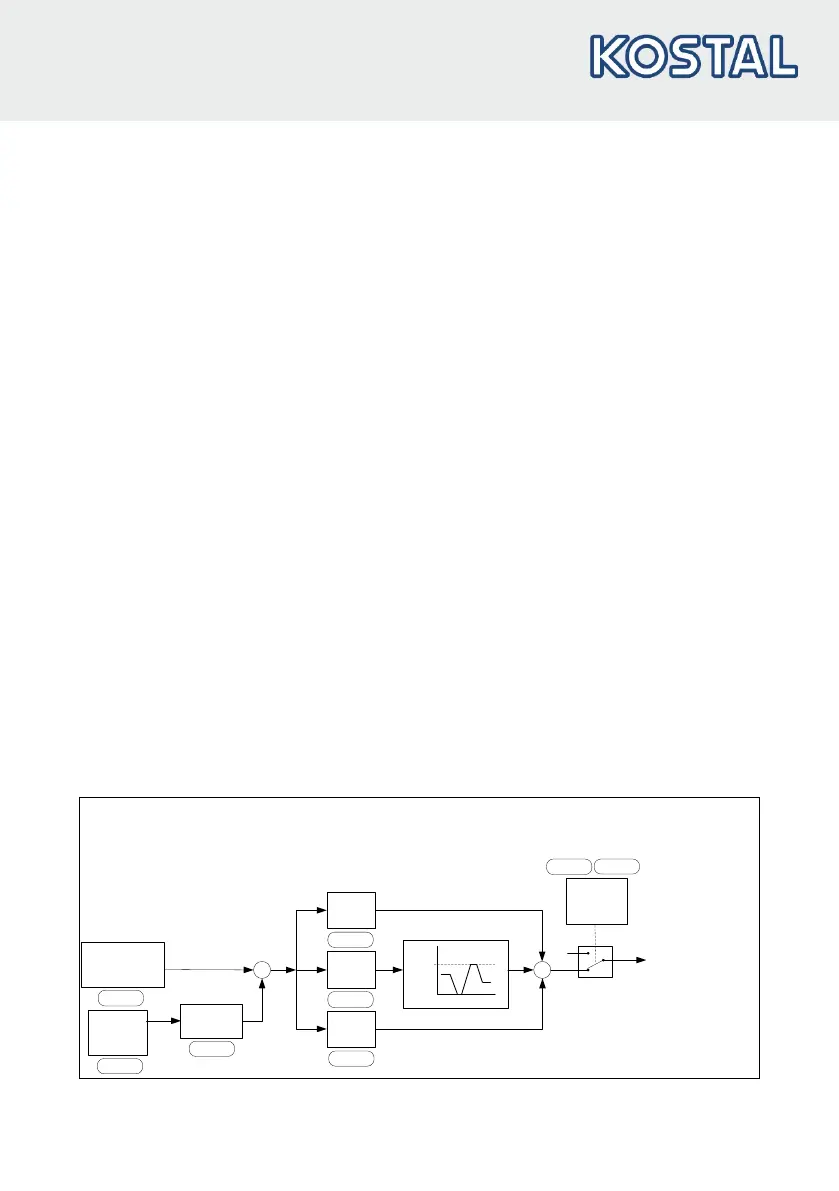
PID process control:
The target value for the PID process controller is read in percentage steps as in the “frequency
setting mode”. 100 % corresponds to the working range of the connected sensor, which is read in
via the actual value input (selected by the “PID actual value”).
Depending on the control difference, a rotation speed value is output to the control output with the
help of the amplification factors for the proportional gain (3.050),
integral gain (3.051) and derivative gain (3.052).
In order to prevent the integral share from increasing infinitely in the case of uncontrollable control
differences, this value is limited to a specific set value (corresponding to the "maximum frequency"
(1.021)).
PID inverted:
The PID actual value can be inverted using parameter 3.061. The actual value is imported
inversely, i.e. 0 V…10 V correspond internally to 100%…0%.
Please note that the target value must also be defined inversely.
An example:
A sensor with an analogue output signal (0 V…10 V) is to operate as the source of the actual value
(at AIx). At an output variable of 7 V (70 %), this is to be regulated inversely. The internal actual
value then corresponds to 100 % – 70 % = 30 %.
In other words, the target value to be specified is 30 %.
Reference
channel
PID
feedback
Inverted
-
KP
KI
KD
Limitation I
part
t
y
i
y
imax
+
0
PID
stand-by
function
Frequency
reference mode
PID process controller operating mode
3.061
3.060
1.130
3.050
3.051
3.052
3.070
3.071
Fig.: 29 PID process control