M Series AC Servo
User Manual
137
Rev. 1.0
7/31/2019
400-820-9661
6: When the dynamical position error is within the range specified by PL command, output Y3 is closed.
7: When the dynamical position error is within the range specified by PL command, output Y3 is open.
A:When the actual velocity reached the targeted velocity, output Y3 is closed.
B:When the actual velocity reached the targeted velocity, output Y3 is open.
3: Output Y3 is used as general output.
Defines the drive
’
s Motion Output digital output function on output Y5. There are 3 Motion Output states
that can be defined:
1: When the drive is enabled, output Y5 is closed.
2: When the drive is enabled, output Y5 is open.
3: Output Y5 is used as general output.
Defines the drive
’
s Motion Output digital output function on output Y6. There are 4 Motion Output states
that can be defined:
4: When the motion is completed and the motor is in position, output Y3 is closed.
5: When the motion is completed and the motor is in position,, output Y3 is open.
C:When the motor is running,
3: Output Y6 is used as general output.
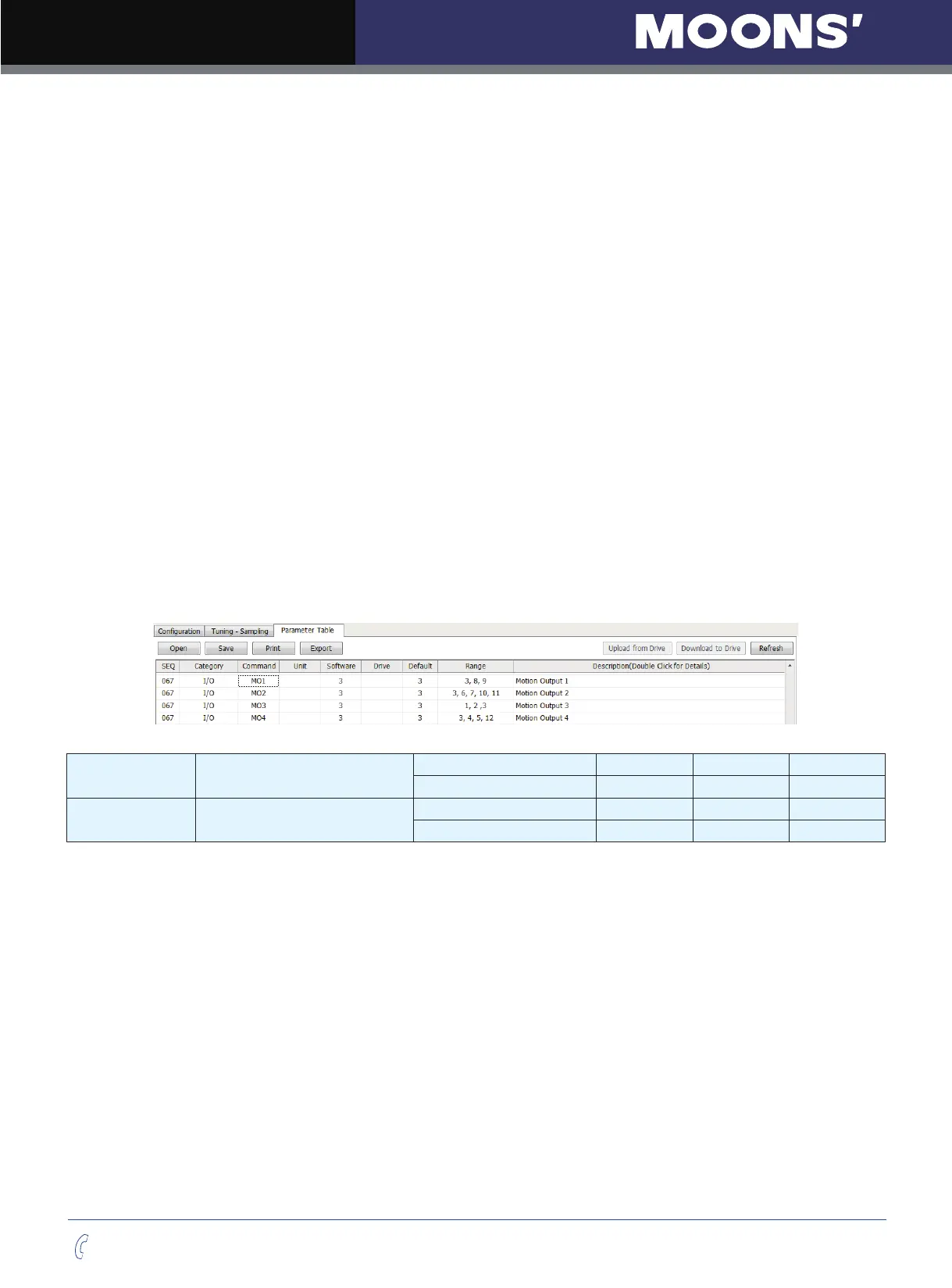
In M servo suite parameter function, it is divided into 4 functions. MO1 for bit 1, MO2 for Bit 2, MO3 for
bit 3, MO4 for bit 4
P-69 (BD) Brake disengage Delay
Data Range Default Unit Data type
0~32000 200 ms DEC
P-70 (BE) Brake engage delay
Data Range Default Unit Data type
0~32000 200 ms DEC