TS read controller status
IMM PGM MIP
USAGE ♦ ♦
SYNTAX TS
PARAMETERS None
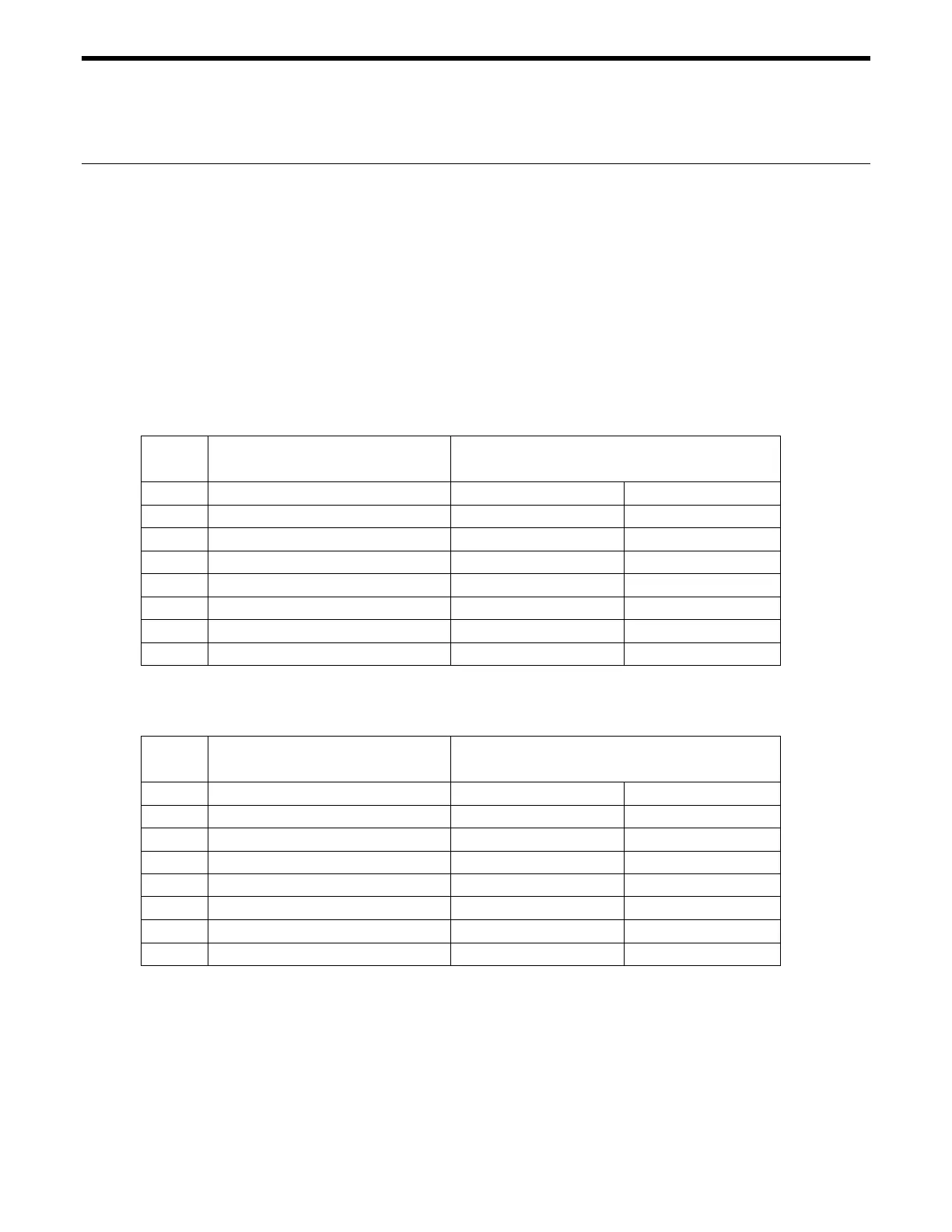
DESCRIPTION This command is used to read the controller status byte. The byte returned is in the form
of an ASCII character. The value of each bit in the status byte can be deduced after
converting the ASCII character into a binary value. Each bit of the status byte represents
a particular controller parameter, as described in the following table.
Note:
Please refer to the Appendix for a complete ASCII to binary conversion table.
I
NTERPRETATION OF LEFT MOST ASCII CHARACTER:
Meaning for
Bit # Function
Bit LOW Bit HIGH
0 Axis #1 motor state Stationary In motion
1 Axis #2 motor state Stationary In motion
2 Axis #3 motor state Stationary In motion
3 Reserved — —
4 Motor power of at least one axis OFF ON
5 Reserved
—
—
6 Reserved
—
—
7 Reserved
—
—
INTERPRETATION OF RIGHT MOST ASCII CHARACTER:
Note:
This ASCII character is returned only if the motion controller supports more than four (4) axes.
Meaning for
Bit # Function
Bit LOW Bit HIGH
0 Reserved
—
—
1 Reserved
—
—
2 Reserved
—
—
3 Reserved
—
—
4 Reserved
—
—
5 Reserved
—
—
6 Reserved
—
—
7 Reserved
—
—
RETURNS ASCII character representing the status byte.
REL. COMMANDS TX - read controller activity
EXAMPLE TS | read controller status
[P | controller returns characters [ and P indicating axes 1, 2 and 4 are
| in motion, and motor power of at least one axis is ON.
3-142 Section 3 – Remote Mode

 Loading...
Loading...








