The first two ways may be used when absolute or relative move
commands can be issued to the master. This is the situation when both
master and slave axes are driven by valid motor types. The third way
may be used when move commands cannot be issued to the master.
This is the situation when the slave axis is driven by a valid motor
type, but the master, such as trackball or joystick, is not.
In any case, a series of preliminary commands have to be issued
before the desired master-slave response is obtained. These include
defining master-slave relationship, appropriate constants and
trajectory mode.
The next section outlines the steps to be taken for a slave axis to
follow master's position. The subsequent section outlines the steps to
be taken for a slave axis to follow master's velocity. The final section
outlines the steps to be taken to jog an axis based on inputs from a
digital joystick.
4.2.2 Slave to a Different Stage
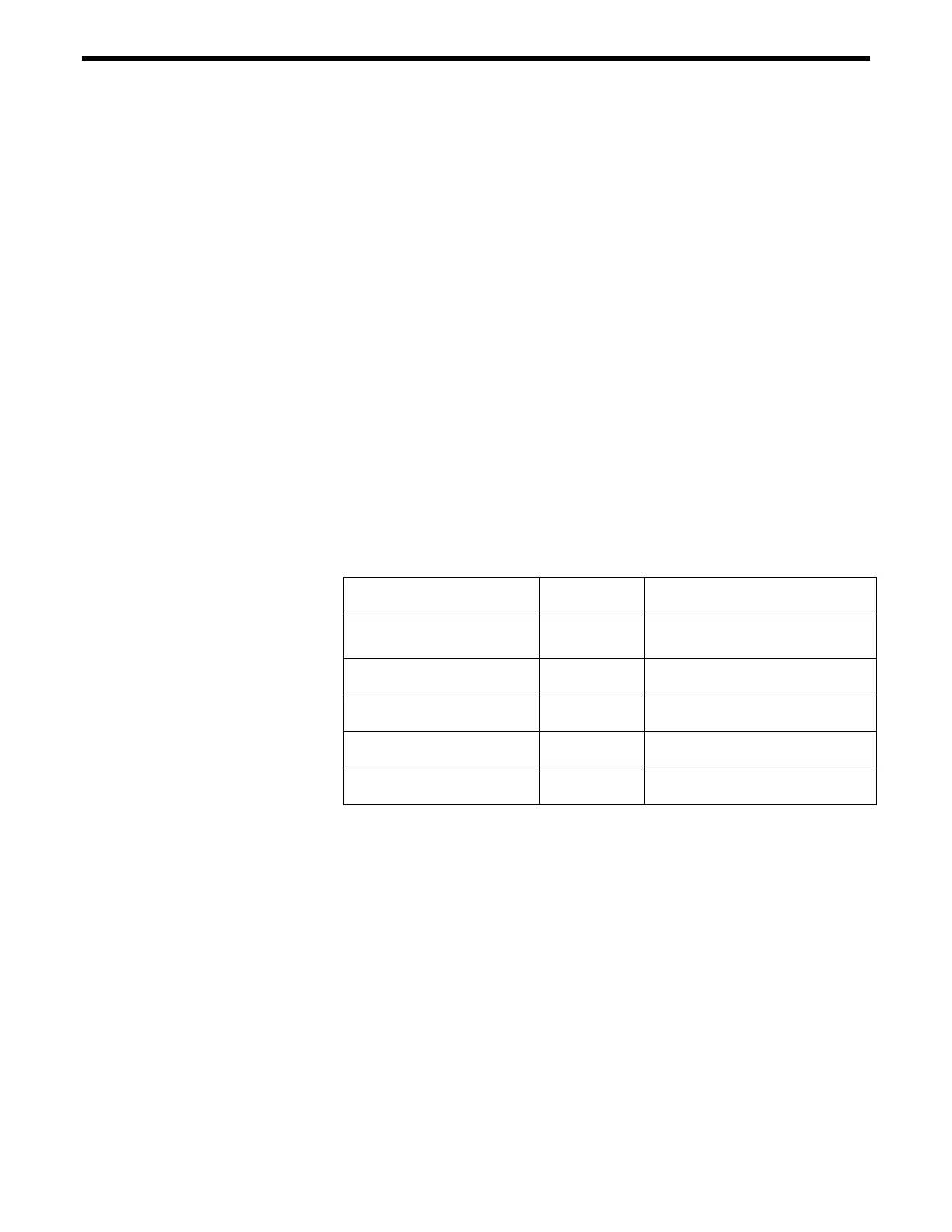
The following steps may be taken for a slave axis to follow master's
position. This mode may be chosen exclusively when absolute or
relative move commands can be issued to the master.
Steps Move
Command
Action by Move Command
1. Define master-slave
relationship
2SS1
Axis #2 is the slave of axis #1
2. Defines master-slave
reduction ratio
2GR0.5
Master's position is scaled by 0.5
to obtain slave's position
3. Define slave axis
trajectory mode
2TJ4 (or 5)
Set slave axis trajectory mode
4. Define master axis
trajectory mode
1TJ1 (or 2)
Set master axis trajectory mode
5. Issue move commands to
master axis
1PA10
1PR10
Move master to absolute 10 units.
Move master by relative 10 units.
Table 4.1: Slave to a Different Stage Steps
4.2.3 Slave to a Trackball
The following steps may be taken for a slave axis to follow master's
velocity. This mode may be chosen exclusively when absolute or
relative move commands cannot be issued to the master. In this case,
when the user moves the master, the slave axis responds by jogging in
proportion to the master's velocity. The slave axis jog velocity update
interval and the scaling coefficients can be defined by the user.
4-8 Section 4 – Advanced Capabilities

 Loading...
Loading...








