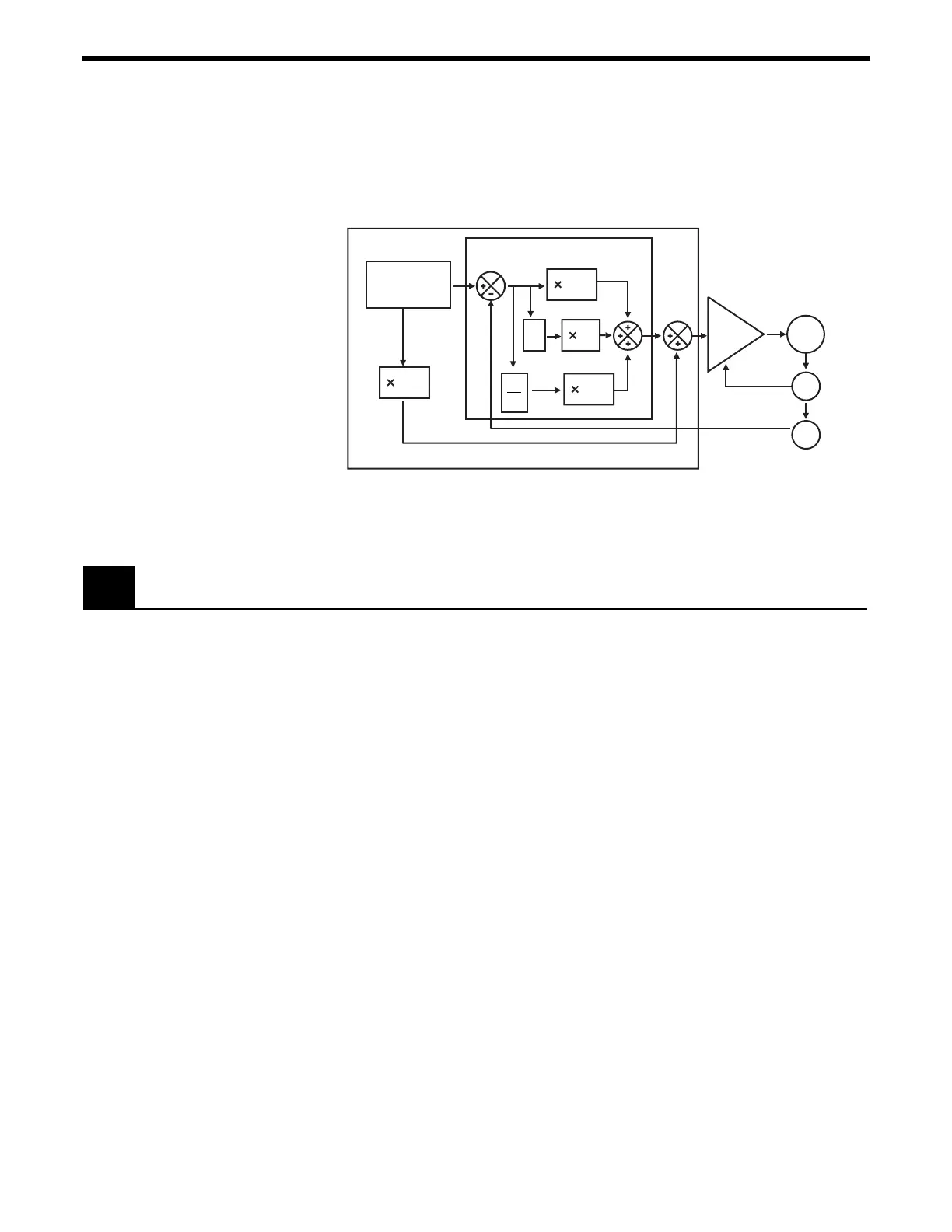
If such a driver is used with a velocity feed-forward algorithm, by
properly tuning the
K
vff
parameter, the feed-forward signal could
perform an excellent job, leaving very little for the PID loop to do.
Trajectory
Generator
Motion Controller
Servo Controller
Driver
Motor
Tachometer
Encoder
Kp
Ki
∫
e
Kd
Kvff
de
dt
e
Figure 5.19: Tachometer-Driven PIDF Loop
5.4 Motion Profiles
When talking about motion commands we refer to certain strings sent
to a motion controller that will initiate a certain action, usually a
motion. There are a number of common motion commands that are
identified by name. The following paragraphs describe a few of them.
5.4.1 Move
A move is a point-to-point motion. On execution of a move motion
command, the motion device moves from the current position to a
desired destination. The destination can be specified either as an
absolute position or as a relative distance from the current position.
When executing a move command, the motion device will accelerate
until the velocity reaches a pre-defined value. Then at the proper time,
it will start decelerating so that when the motor stops, the device is at
the correct position. The velocity plot of this type of motion will have
a trapezoidal shape (
Figure 5.20). For this reason, this type of motion
is called a trapezoidal motion.
5-18 Section 5 – Motion Control Tutorial

 Loading...
Loading...








