Desired Velocity
Time
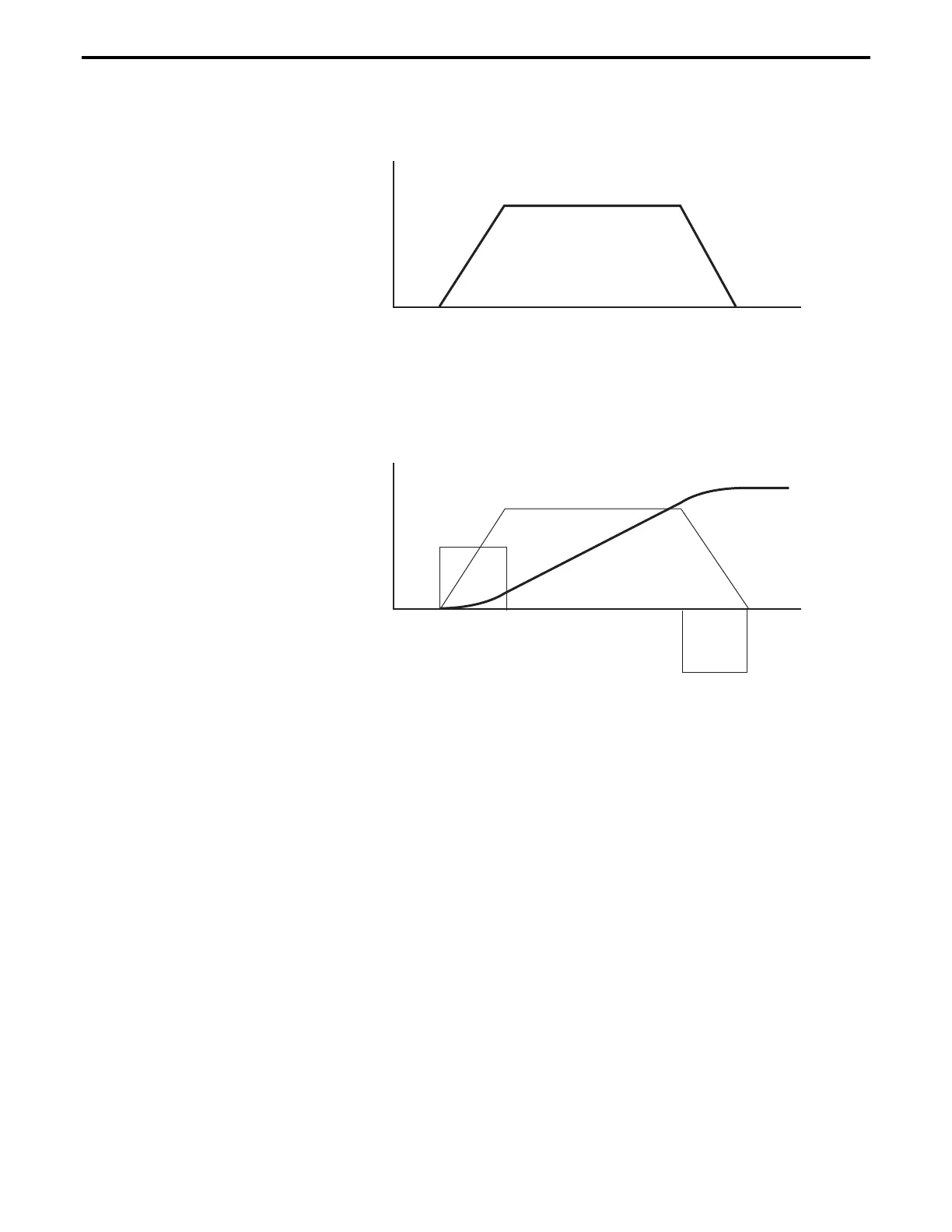
Figure 5.20: Trapezoidal Motion Profile
The position and acceleration profiles relative to the velocity are
shown in (
Figure 5.21).
Position
Desired Velocity
Time
Acceleration
Figure 5.21: Position and Acceleration Profiles
Besides the destination, the acceleration and the velocity of the
motion (the constant portion of it) can be set by the user before every
move command. Advanced controllers like the ESP300 allow the user
to change them even during the motion.
5.4.2 Jog
When setting up an application, it is often necessary to move stages
manually while observing motion. The easy way to do this without
resorting to specialized input devices such as joysticks or track-
wheels is to use simple push-button switches. This type of motion is
called a jog. When a jog button is pressed the selected axis starts
moving with a pre-defined velocity. The motion continues only while
the button is pressed and stops immediately after its release.
The ESP300 offers two jog speeds. Both high speed and low speed
are user programmable. The jog acceleration is also ten times smaller
than the programmed maximum acceleration values.
Section 5 – Motion Control Tutorial 5-19

 Loading...
Loading...








