The Accuracy is a static measure of a point-to-point positioning error.
Starting from a reference point, the user should command the
controller to move a certain distance. When the motion is completed,
the user should measure the actual distance traveled with an external
precision-measuring device. The difference (the Error) represents the
positioning Accuracy for that particular motion.
Because every application is different, the user needs to know the
errors for all possible motions. Since this is practically impossible, an
acceptable compromise is to perform the following test.
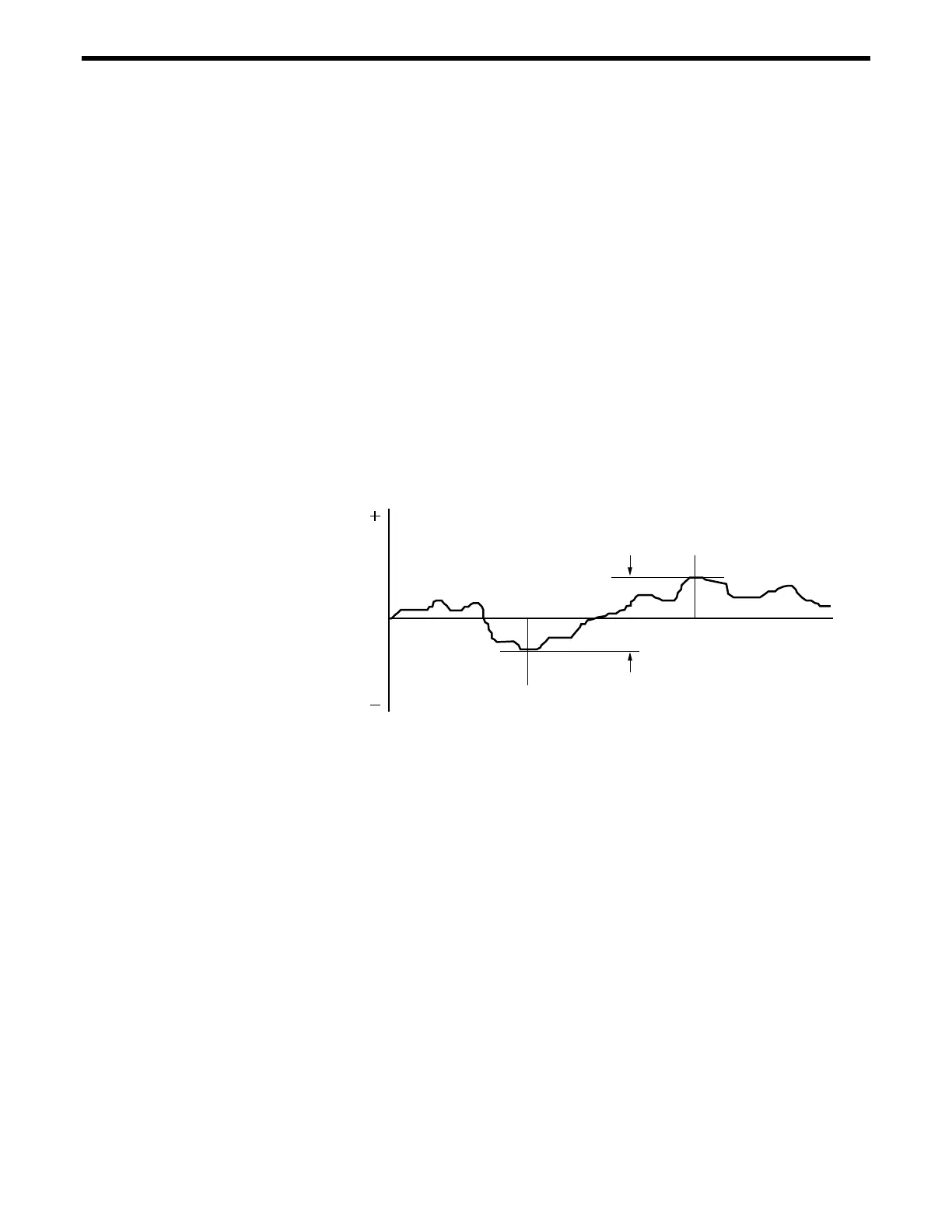
Starting from one end of travel, the user can make small incremental
moves and at every stop, the user should record the position Error.
The user performs this operation for the entire nominal travel range.
When finished, the Error data is plotted on a graph similar to
Figure
5.2.
Figure 5.2: Position Error Test
A
B Position
max. error
Error
0
The difference between the highest and the lowest points on the graph
is the maximum possible Error that the motion device can have. This
worst-case number is reported as the positioning Accuracy. It
guaranties the user that for any application, the positioning error will
not be greater than this value.
5.2.4 Local Accuracy
For some applications, it is important to know not just the positioning
Accuracy over the entire travel but also over a small distance. To
illustrate this case,
Figure 5.3a and Figure 5.3b shows two extreme
cases.
5-4 Section 5 – Motion Control Tutorial

 Loading...
Loading...








