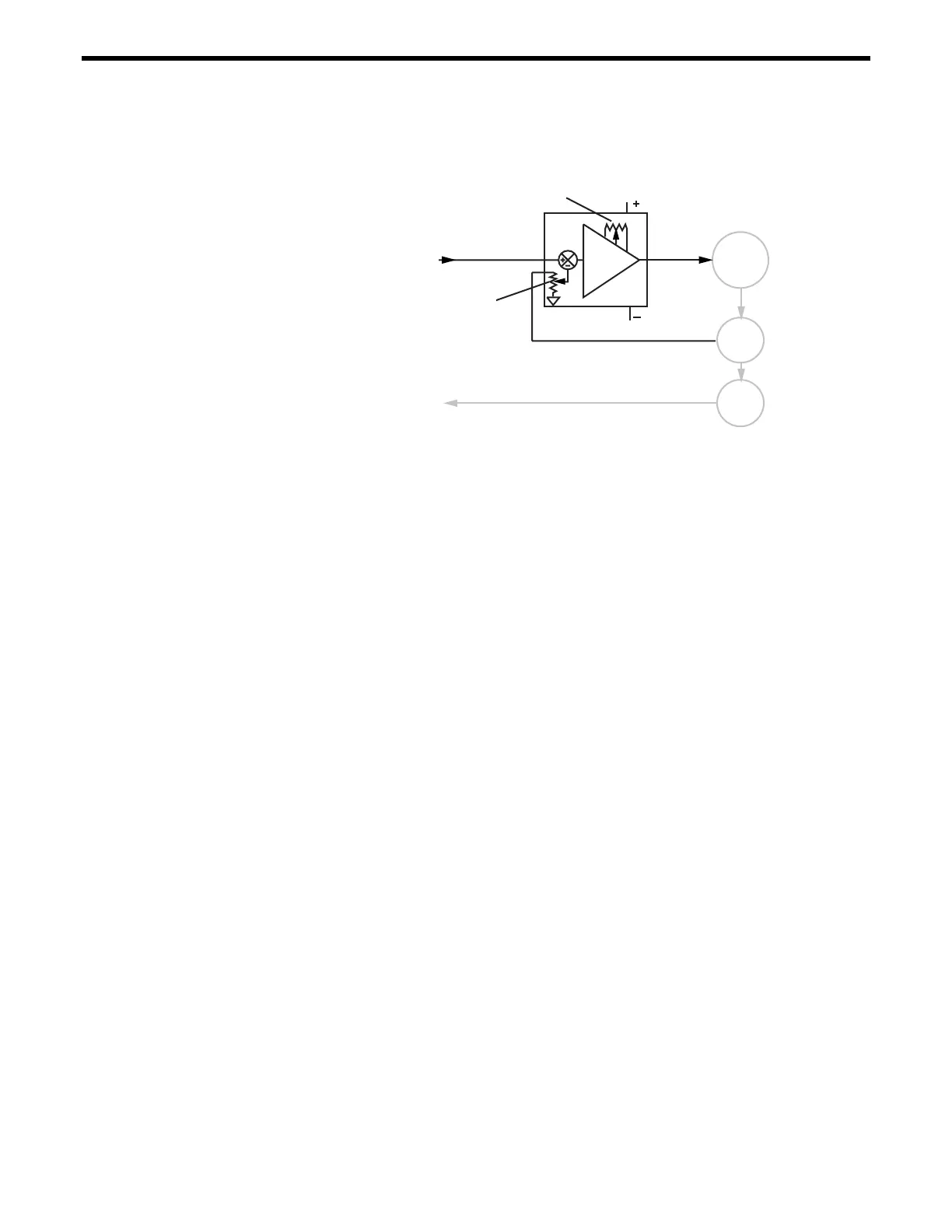
General purpose velocity feedback drivers have usually two
adjustments: tachometer gain and compensation (
Figure 5.52).
Figure 5.52: DC Motor Tachometer Gain and Compensation
The tachometer gain is used to set the ratio between the control
voltage and the velocity. The compensation adjustment reduces the
bandwidth of the amplifier to avoid oscillations of the closed loop.
5.7.3.1 PWM Drivers
M
T
E
V = velocity
control signal
±10V
tach. gain
compensation
tachometer
gain
Even though linear amplifiers are simpler and cleaner (do not
generate noise), their low efficiency makes them impractical to be
used with medium and larger motors. The most common types of DC
drivers use some kind of PWM (
Pulse-Width Modulation) techniques
to control the current and/or voltage applied to the motor. This allows
for a more efficient and compact driver design.
5-38 Section 5 – Motion Control Tutorial

 Loading...
Loading...








