• Disadvantage – lower efficiency since only half the windings
are being used.
2. Connect the two opposing phases (1-3 and 2-4) in series.
•
Advantage – the motor does not require more than the nominal
current.
•
Disadvantage – the driver will see twice the nominal motor
inductance that will reduce the motor's torque performance at
higher speeds.
3. Connect the two opposing phases (1-3 and 2-4) in parallel.
•
Advantage – the motor inductance does not increase, allowing
it to perform well at higher speeds.
•
Disadvantage – requires the driver to supply twice the motor's
nominal current.
2
4
6
8
1
3
5
7
±
Figure 5.48: Dual H-Bridge Driver
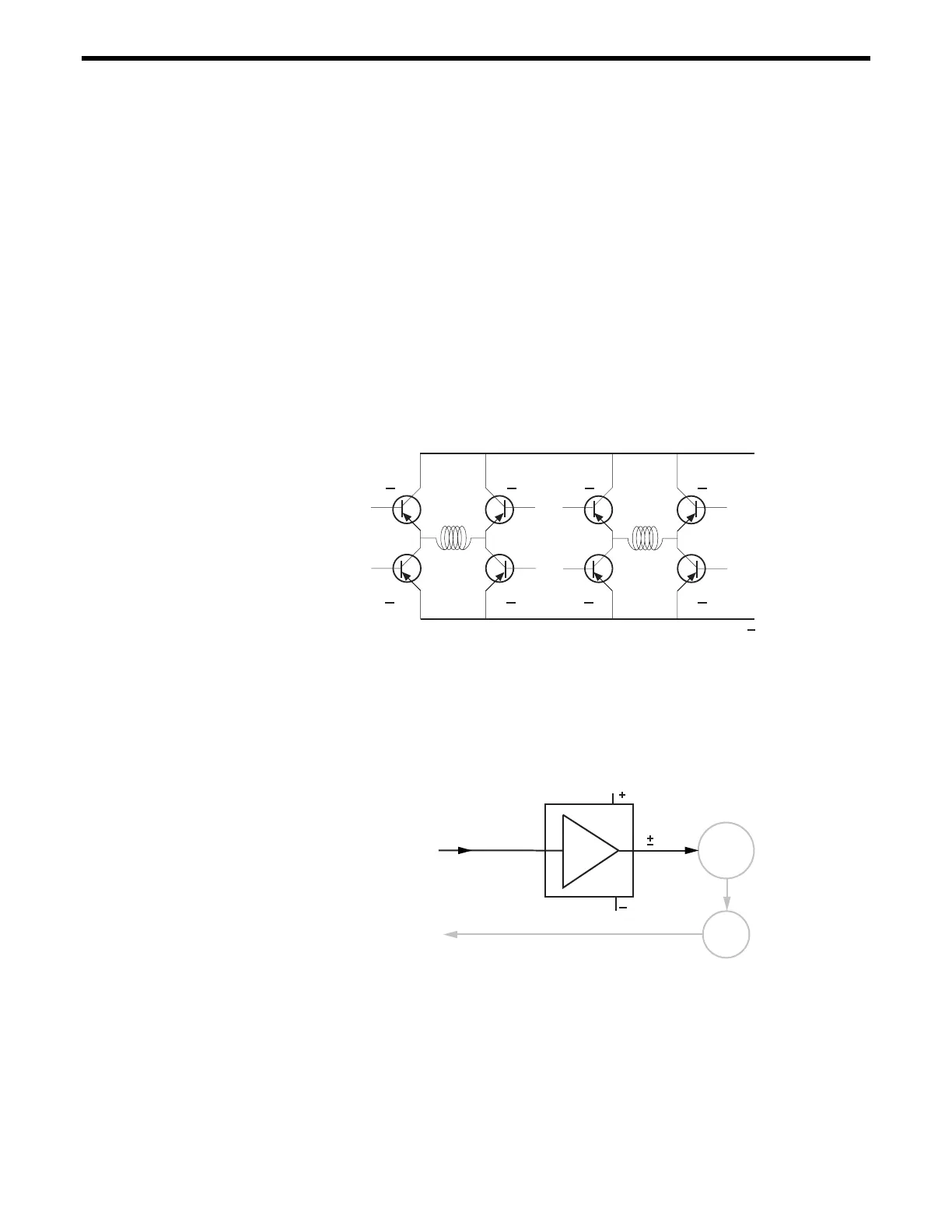
5.7.3 DC Motor Drivers
There are three major categories of DC motor drivers. The simplest
one is a voltage amplifier (
Figure 5.49).
In
control signal
±10V
M
E
Figure 5.49: DC Motor Voltage Amplifier
The driver amplifies the standard ±10 V control signal to cover the
motor's nominal voltage range while also supplying the motor's
nominal current.
5-36 Section 5 – Motion Control Tutorial

 Loading...
Loading...








