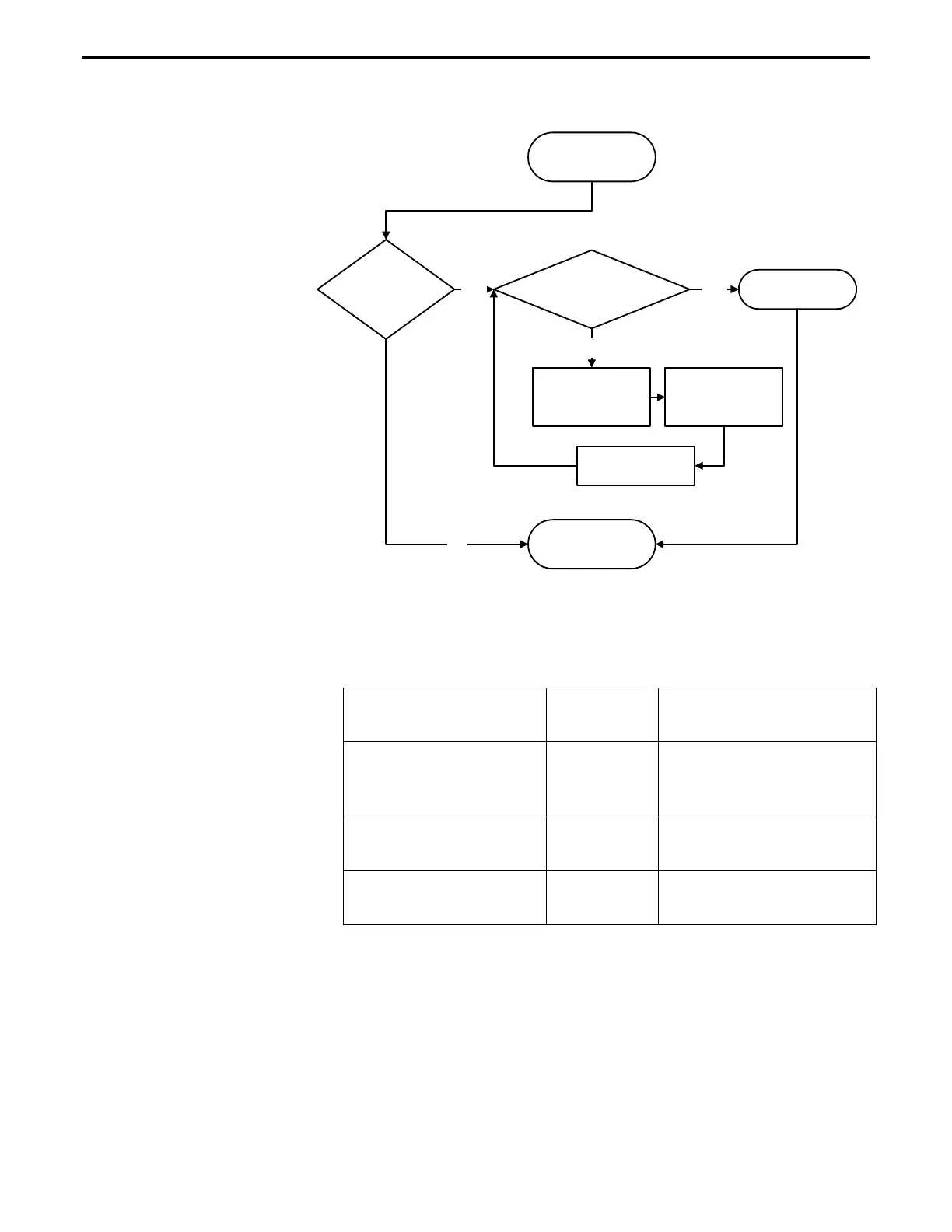
F
Desired
motion
completed?
Start closed loop
update interval
timer
Yes
Is actual
position within desired
deadband?
Motion doneYes
No
Make desired
correction
Wait for timer to
reset
Exit closed loop
stepper positioning
Start closed loop
stepper positioning
No
Figure 4.5: Block Diagram of Closed Loop Stepper Motor Positioning
The following steps (See Table 4.4) may be followed to setup the
closed loop stepper motor positioning.
Steps ASCII
Command
Action by Controller
1. Set feedback
configuration.
1ZB300 Enable encoder feedback and
closed loop positioning of
stepper motors for axis #1.
2. Specify deadband value. 1DB1 Set deadband value for axis 31
to 1 encoder count.
3. Specify closed loop update
interval.
1CL50 Set closed loop update interval
for axis #1 to 50 milliseconds.
Table 4.4: An Example of Closed Loop Stepper Motor Positioning Setup
Commands related to closed loop stepper positioning are listed in
Table 4.5 (refer to Section 3: Remote Mode, for additional details):
Section 4 – Advanced Capabilities 4-11

 Loading...
Loading...








