Handbook
November 2011 / 59-UMC0071 / Issue 01
Mercury iTC
Page 123
THEORY OF CONTROL LOOPS
Original Instructions
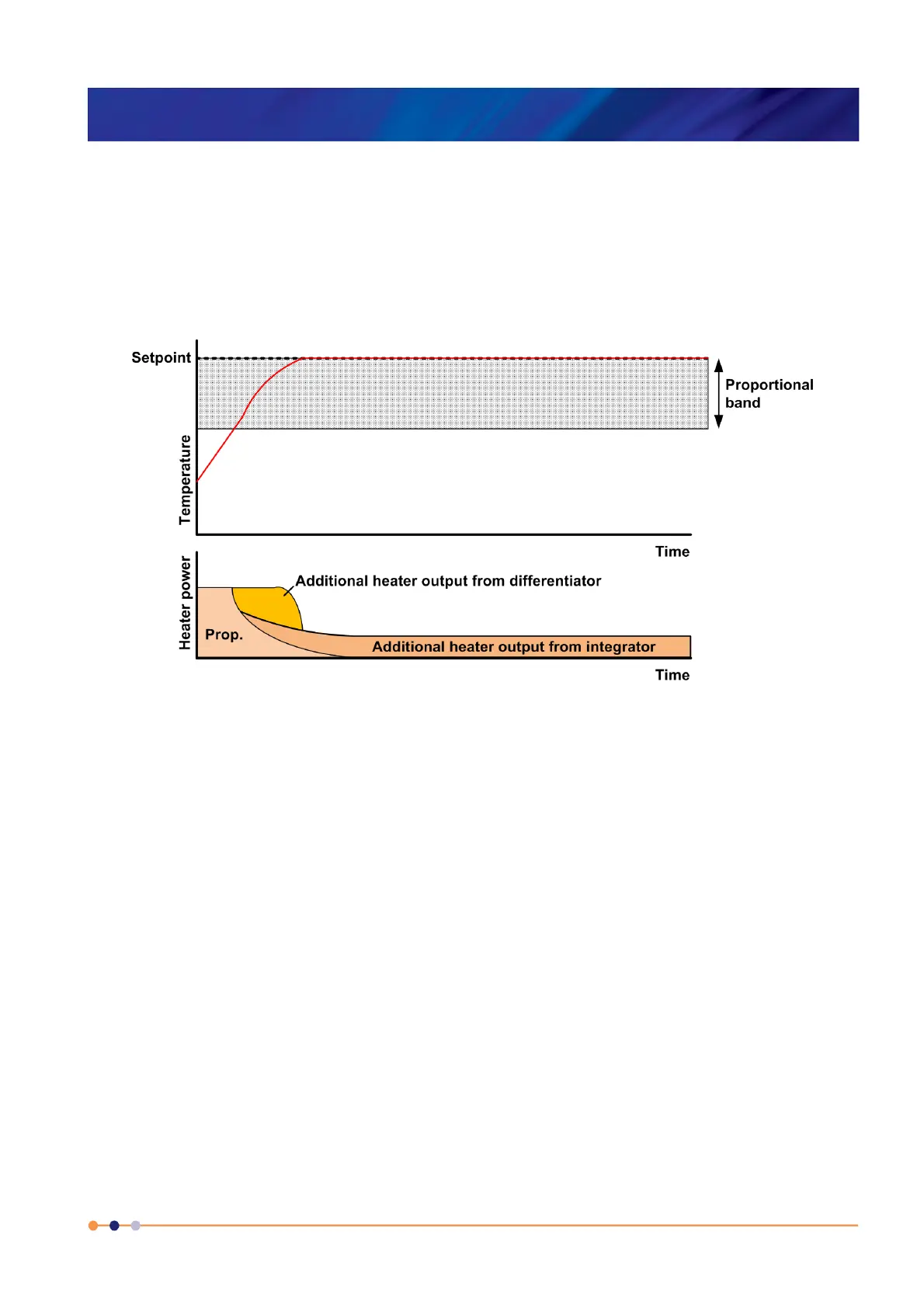
12.2.5 Proportional control with integral and derivative action
Adding derivative action to the proportional control loop can improve the control
response. Derivative action monitors the rate of change of the measured temperature,
and modifies the control output to minimise this rate of change.
Derivative action is characterised by an action time. If the measured temperature is
changing at a rate of one proportional band per derivative action time, the derivative
action contributes a signal sufficient to reduce a maximum control output to zero.
Figure 12-4 Proportional control with integral and differential action
Some control systems may have sufficient control response without using derivative
action.
A PID controller can be made to operate in this mode by setting the proportional band
(P) parameter to a positive temperature value, the integral (I) parameter to a non-zero
action time, and the derivative (D) parameter to a non-zero action time.
12.2.6 North American terminology
In North America, a different terminology exists for describing 3-term control:
Proportional band is replace by its reciprocal, Gain.
Integral Action is replaced by Reset. Reset may be specified as a time (as for Integral
Action), or by its reciprocal Repeats Per Minute.
Derivative Action is replaced by Rate. Rate may be specified as a time, or by its
reciprocal Repeats Per Minute.

 Loading...
Loading...