F0 MV, H 102, DT 100
R21
DF
X2
R20
R20
F0 MV, K1000, DT 101
F0 MV, K6000, DT 102
F0 MV, K 300, DT 103
F1 DMV, K−8000, DT 104
F0 MV, K 0, DT 106
R903A R22
DF
R20
R21
F168 SPD1, DT 100, H 0
DF/
R903A
R22
R22
R20 T1
Positioning operations running
Positioning operations start
Positioning completion pulse (1 s)
TMX 1, K10
High−speed Counter/Pulse Output/ PWM OutputFP0
9 − 27
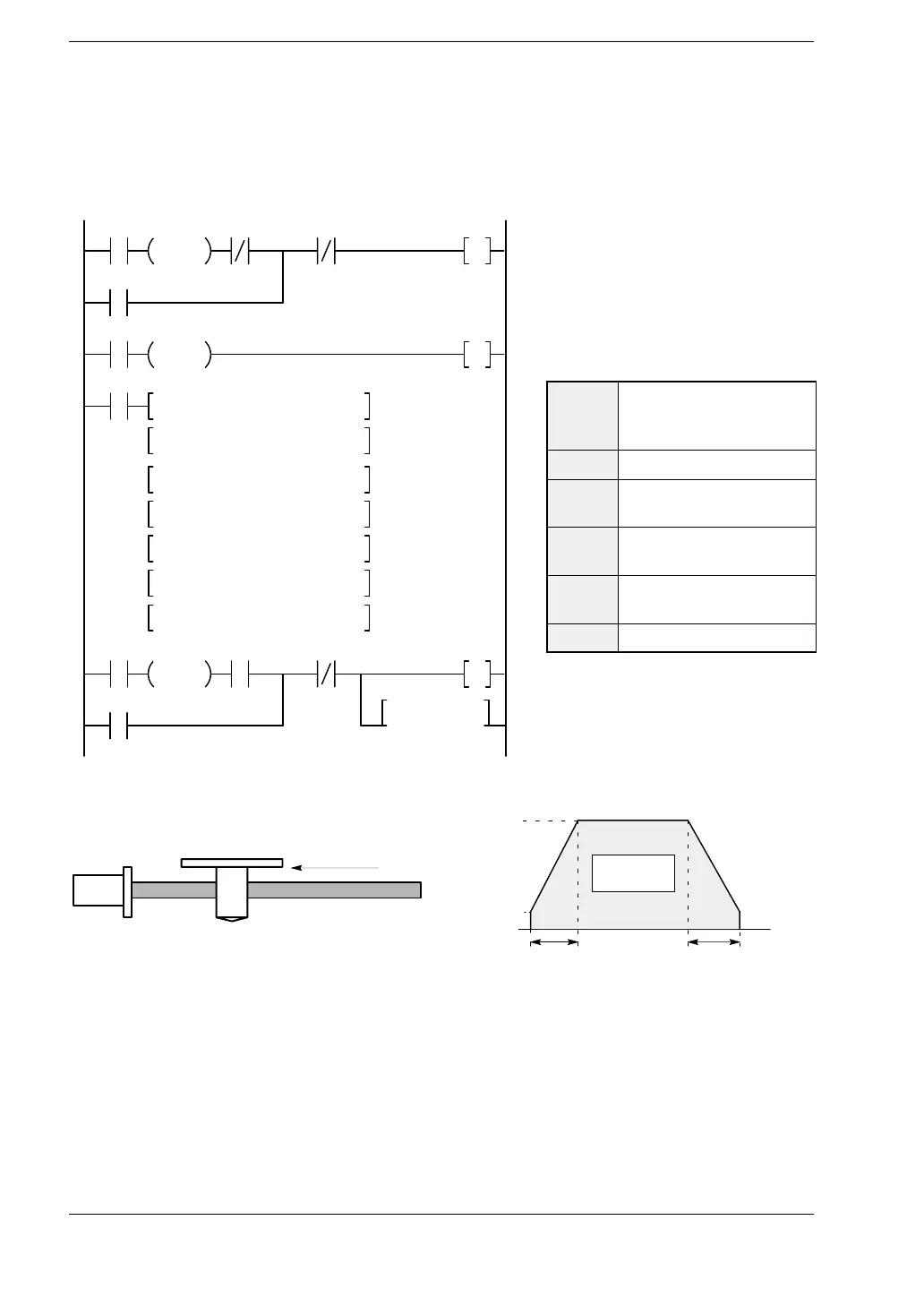
9.4 Pulse Output Function
Relative value positioning operation (minus direction)
When X2 turns on, a pulse is output from Y0. At this time, directional output Y2 turns
on.
DT100 Control code: H102
[refer to “instruction
F168 (SPD1)”]
DT101 Initial speed: 1000 Hz
DT102 Maximum speed:
6000 Hz
DT103 Acceleration/decelera-
tion time: 300 ms
DT104
DT105
Movement amount:
−8000 pls
DT106 Pulse stop
Motor
(− side) (+ side)
300 ms
300 ms
6000 Hz
1000 Hz
0Hz
8000 pulses
8000
pulses