Setting up Compax3
50 I11 T11 192-120101 N6 - March 2004
4.1.6. Defining jerk / ramps
In this chapter you can read about:
Ramp upon error/deenergize..........................................................................................................51
Jerk
You can use the jerk limit (= maximum change in acceleration) to limit the
maximum change in acceleration.
A motion process generally starts from a standstill, accelerates constantly at the
specified acceleration to then move at the selected speed to the target position.
The drive is brought to a stop before the target position with the delay that has
been set in such a manner as to come to a complete stop at the target position. To
reach the set acceleration and deceleration, the drive must change the acceleration
(from 0 to the set value or from the set value to 0). This change in speed is limited
by the maximum jerk.
t
4
t
t
t
1
2
3
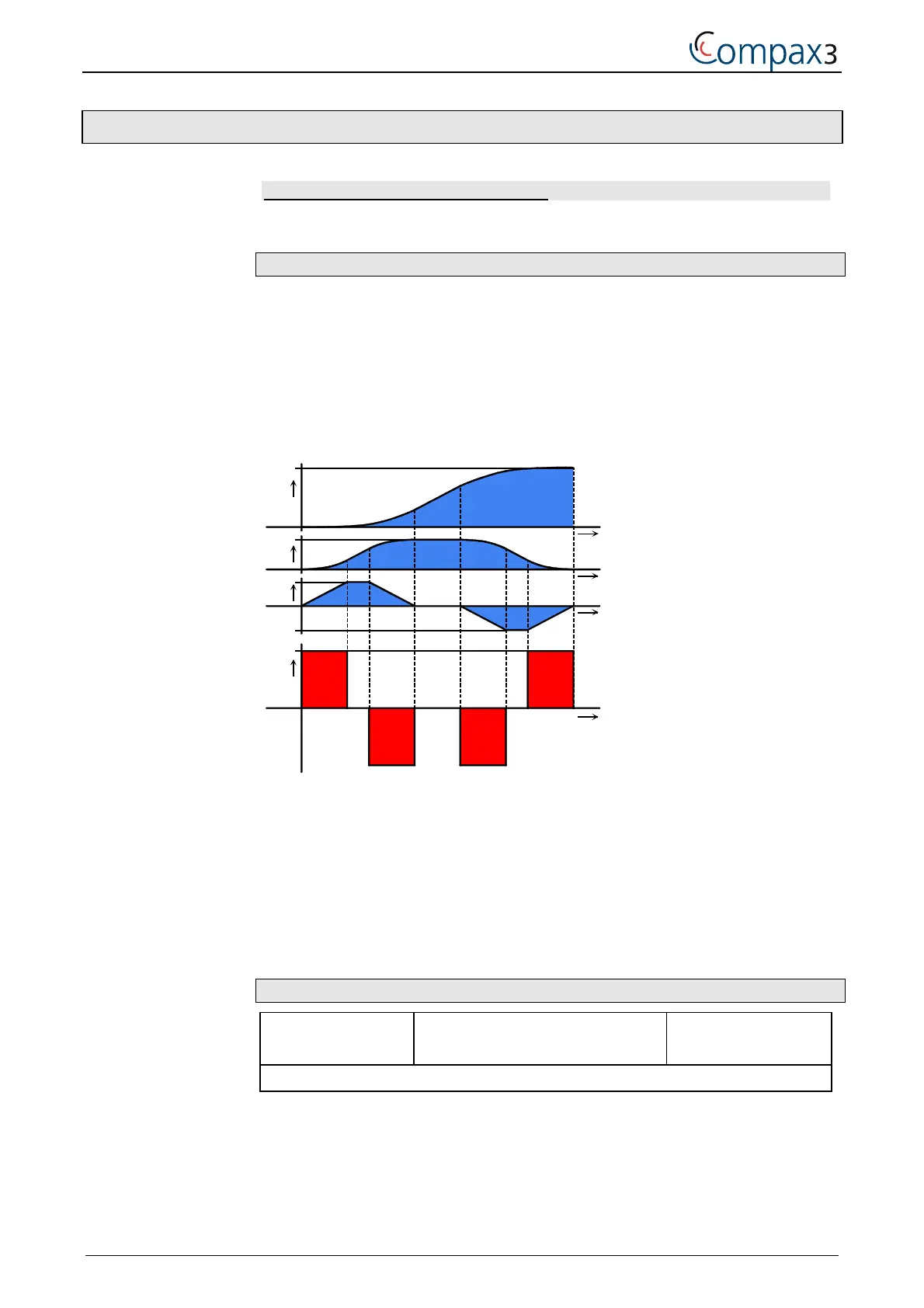
1: Position
2: Speed
3: Acceleration
4: Jerk
Changes in acceleration (jerks) often have negative effects on the mechanical
systems involved. There is a danger that mechanical resonance points will be
excited or that impacts will be caused by existing mechanical slack points.
You can reduce these problems to a minimum by specifying the maximum jerk.
Jerk
Unit: unit/s
3
Range: 0 ... 10 000 000 Standard value:
1 000 000
 Loading...
Loading...








