Setting up Compax3 C3I22T11
130 192-120114 N5 C3I22T11 June 2008
Software end limit in continuous mode
Each individual positioning is confined within the travel limits.
A positioning order aiming at a target outside the software end limits is not execu-
ted.
The reference is the respective current position.
A software end limit error is triggered, if the position value exceeds an end limit.
For this, the position setpoint value is evaluated in energized state; in cur-
rentless state, the actual position value is evaluated.
Hysteresis in disabled state:
If the axis stands currentless at an end limit, another error may be reported due to
position jitter after acknowledging the end limit error. To avoid this, a hysteresis
surrounding the end limits was integrated (size corresponds to the size of the posi-
tioning window).
Only if the distance between axis and the end limits was larger than the positioning
window, another end limit error will be detected
Error codes (see page 339) of the end limit errors:
0x7323
Error when disregarding the positive software end limit.
0x7324 Error when disregarding the negative software end limit.
Activating / deactivating the end limit error:
In the C3 ServoManager under configuration: End limits, the error can be
(de)activated.
For IEC-programmable devices with the "C3_ErrorMask" module.
The end limits are not active after switching on. The end limits do not refer to the
position reference point until after a machine reference run.
During homing run the end limits are not monitored.
With a Multiturn encoder or with active Multiturn emulation, the limit is valid imme-
diately after switching on.
1. If the software end limit errors are deactivated, all movements are possi-
ble.
2. if the software end limit errors are activated:
After disregarding the software end limits, an error is triggered. First of all, this error
must be acknowledged.
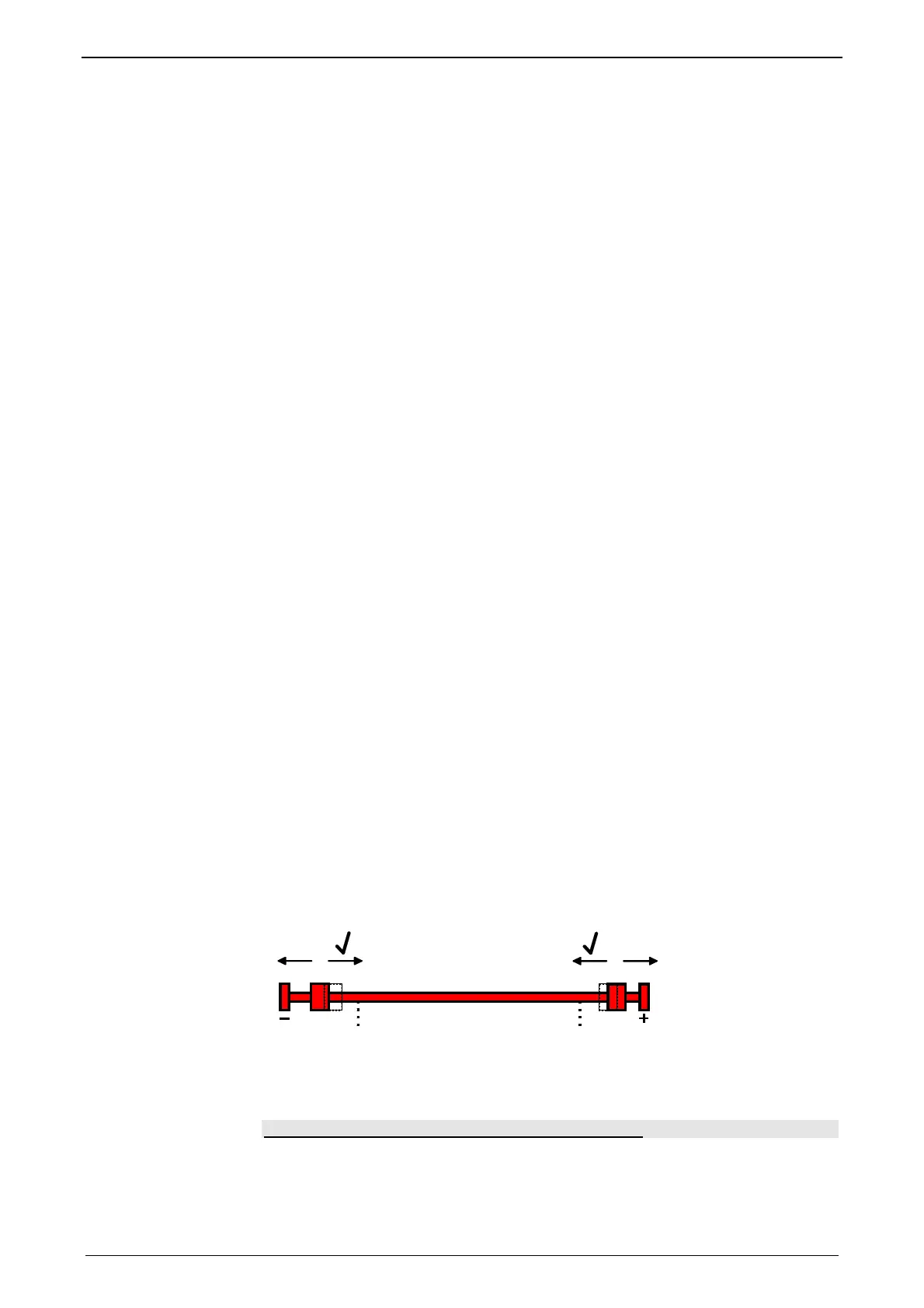
Then a direction block is activated: only motion commands in the direction of the
travel range are executed. These will not trigger another error.
Motion commands inciting a movement in the opposite direction of the travel range
are blocked and will trigger another error.
Error
2
Error
1
1: negative end limit
2: positive end limit
Notes on special feedback systems (Feedback F12)
During automatic commutation, the end limit monitoring is deactivated!
Error when disre-
garding the software
end limits
Behavior after the
system is turned on
Behavior outside the
travel range

 Loading...
Loading...










