Setting up Compax3 C3I22T11
108 192-120114 N5 C3I22T11 June 2008
4.1.7.1 Measure reference
In this chapter you can read about:
You can select from among the following for the unit:
mm,
icrements *
angle degrees or
Inch.
The unit of measure is always [mm] for linear motors.
*
The unit "increments" is valid only for position values!
speed, acceleration and jerk are specified in this case in revolutions/s, revoluti-
ons/s
2
and revolutions/s
3
(resp. pitch/s, pitch/s
2
, pitch/s
3
).
---------------------------------------------------------------------------------------------
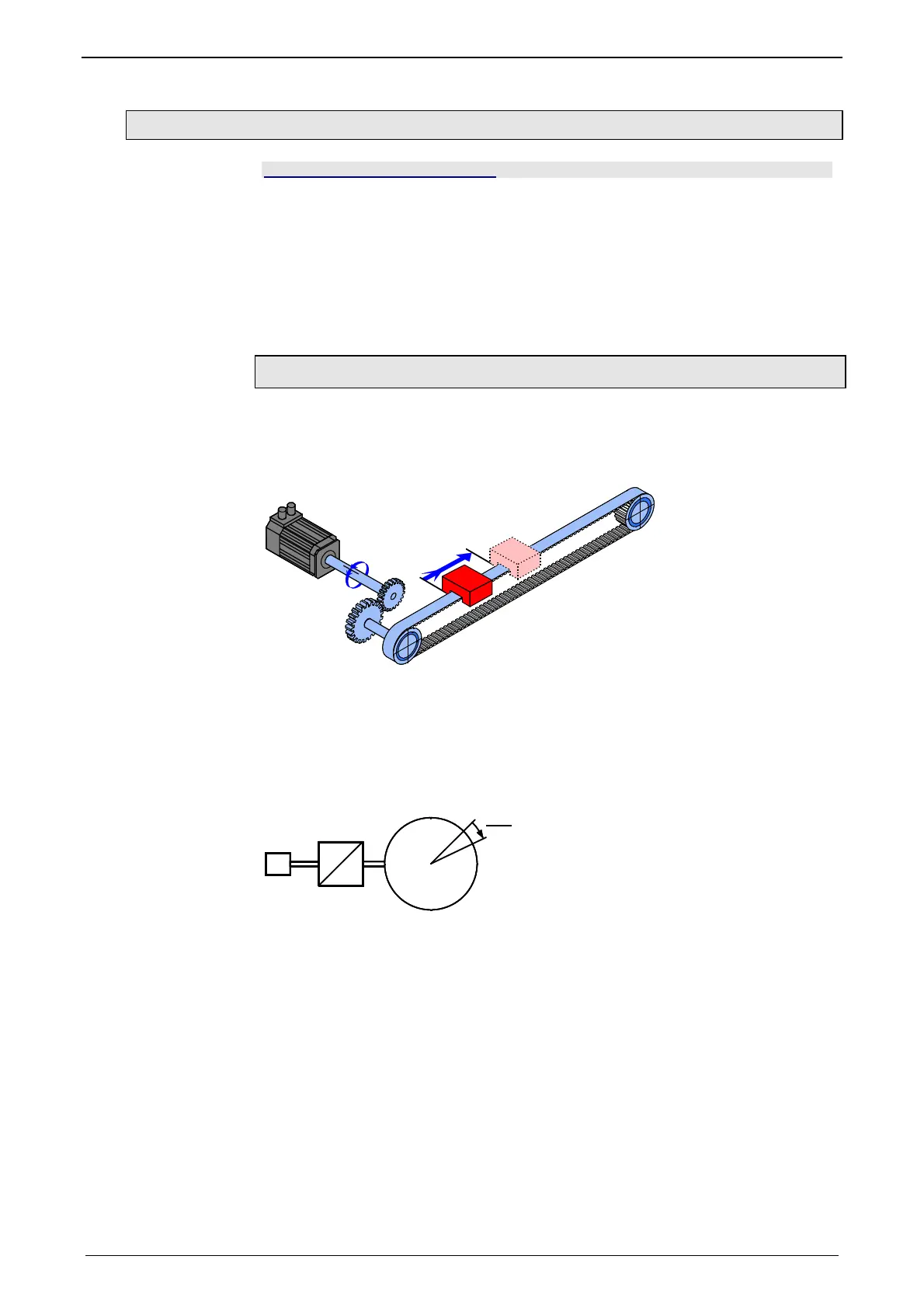
The measure reference to the motor is created with the value:
"travel distance per motor revolution / pitch" in the selected unit.
You can enter the "travel distance per motor revolution" as a fraction (numerator
divided by denominator). This is useful in the case of continuous operation mode or
in reset mode if the value cannot be specified as a rational number. This makes it
possible to avoid long-term drifts.
Rotary table control
M
70
4
144°
7
Unit: Degrees
Gear transmission ratio 70:4 => 4 load revolutions = 70 motor revolutions
Travel distance per motor revolution = 4/70 * 360° = 20.571 428 5 ...° (number
cannot be represented exactly)
Instead of this number, you have the option of entering it exactly as a numerator
and denominator:
Travel distance per motor revolution = 144/7
This will not result in any drift in continuous operation mode or in reset mode, even
with relatively long motion in one direction.
Unit of Travel
Travel distance per
motor revolution /
pitch
Input as numerator
and denominator
Example 1:

 Loading...
Loading...










