Parker EME
Communication
192-120114 N5 C3I22T11 June 2008 317
5.4.3.4 Controlword /Statusword
In this chapter you can read about:
Control word 1 (Controlword 1)........................................................................................ 317
Statusword 1 (Statusword) .............................................................................................. 319
Interpolated Position / Cyclic Sy
nchronous Position Mode.............................................. 319
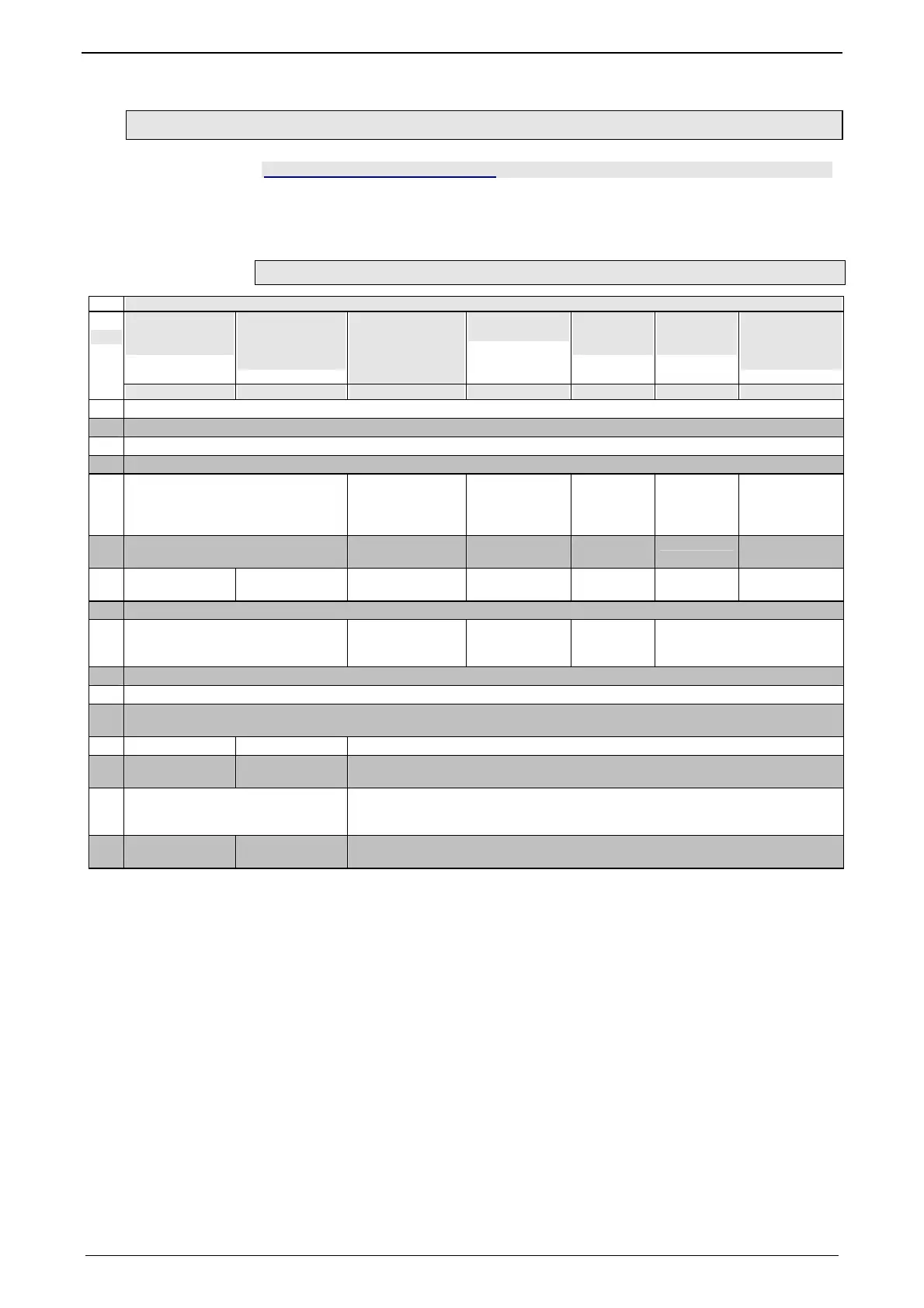
Control word 1 (Controlword 1)
Operating mode BA C3 object class instance 1100 attribute 5
Direct positio-
ning
(Profile Position)
Positioning with
set selection
(Position Record
Select)
Velocity control
(Profile Velocity)
Setpoint value =
0x60FF
(Object 1100.13)
Machine zero
(Homing)
Manual
operation
(Jogging)
Interpolated
Position
2)3)
(ip-mode)
Cyclic Syn-
chronous Posi-
tion (csp-mode)
2) 4)
Bit
BA = "1" BA = "-2" BA = "3" BA = "6" BA = "-1" BA = "7" BA = "8"
0 ="1": Switch on
1 ="1": Enable Voltage
2 ="0": Quick stop
3 ="1": Enable Operation
4 ="1": New set-point (Start) Reserved ="1": Homing
operation start
(activate homing
run)
="1": Jog+
(Hand+)
="1": Enable
ip mode
-
5 ="1": Change set immediately
1)
(dynamicpositioning (see page 154))
Reserved Reserved ="1": Jog-
(Hand-)
6 Mode 2 (see
below)
Reserved Reserved Reserved Reserved
7 ="1": Fault reset (Quit, with positive edge)
8 ="1": Halt (Stop without termination)
(for Velocity and Gearing: Stop with
termination)
="1": Halt (Stop
without termination)
="1": Halt (Stop
with termination)
="1": Halt
(Stop without
termination)
="1": Halt (Stop with termination)
9 Reserved
10 Reserved
11 ="0": Remote Control: Control word active, i.e. control DeviceNet
="1": Local Control: Control word inactive, i.e. the control word is not read; direct control via inputs (see page 141) possible.
12 Reserved Reserved Reserved
13 Mode 1 (see
below)
Reserved Reserved
14 ="1": Endless (continuous operation)
in normal operation (="0") homing is
required
Reserved
15 Mode 0 (see
below)
Reserved Reserved
1) With Bit 5 ="0" no dynamic change of record is possible - not even to a STOP
record.
Only after the end of the record (position reched), the next record will be accepted.
2) Operating mode is not supported with DeviceNet (I22).
3)
Interpolated Position Mode (see page 319)
The operating mode switching to "Interpolated Position Mode" takes place during
operation (via the bus) and is not supported by the configuration in the ServoMa-
nager.
The command position of the "Interpolated Position mode" is preset via the bus
object 3921.1 "Interpolation data". This bus object can be mapped to the telegram
in the "Position Mode".
the "Interpolated Position Mode" works in SYNC operation; the cycle time is preset
via bus object 0x1006; please respect the ratings.
Gearing is not possible in the "interpolated" operating mode.
4) Cyclic Synchronous Position (see page 319)
The operating mode switching to "Cyclic Synchronous Position" takes place during
operation (via the bus) and is not supported by the configuration in the ServoMa-
nager.

 Loading...
Loading...










