Parker EME
Communication
192-120114 N5 C3I22T11 June 2008 319
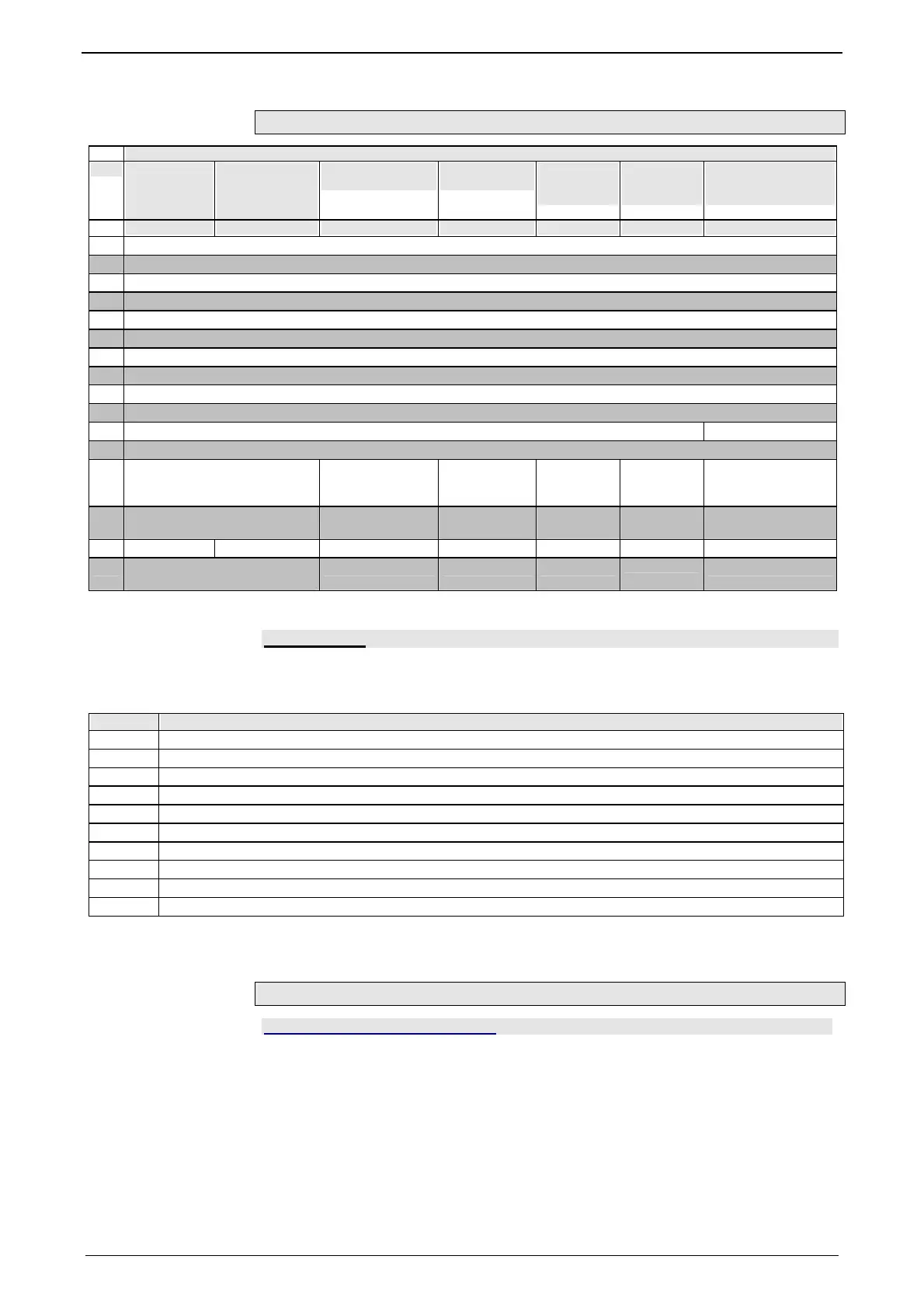
Statusword 1 (Statusword)
Operating mode BA C3 object class instance 1100 attribute 5
Bit Direct posi-
tioning
(Profile Posi-
tion)
Positioning with
set selection
(Position Re-
cord Select)
Speed control
(Profile Velocity)
Machine zero
(Homing)
Manual
operation
(Jogging)
Interpolated
Position 2)
(ip-mode)
Cyclic Synchronous
Position (csp-mode)
2)
BA = "1" BA = "-2" BA = "3" BA = "6" BA = "-1" BA = "7" BA = "8"
0 ="1": Ready to switch on
1 ="1": Switched on
2 ="1": Operation enable
3 ="1": Fault (Compax3 reports error)
4 ="0": Voltage enable
5 ="0": Quick stop
6 ="1": Switch on disable
7 Reserved
8 ="1": Speed=0 (drive motionless)
9 ="1": Remote (Parameters can be changed via DeviceNet)
10 ="1": Target reached (corresponds to Position / Speed / Gearing reached) 0
11 ="1": Internal limit active
12 ="1": Setpoint acknowledge (new
setpoint value is accepted)
="1": Speed=0 ="1": Homing
attained (refe-
renced)
0 ="1": ip mode
active
"0": Target ignore
"1": Target accepted
13 ="1": Following error 0 ="1": Homing
error
0 - ="1": Following error
14 0 0 0 0 0
15 ="1": Registration found (Regi-
stration mark detected)
0 0 0
2) Operating mode "interpolated" is not supported with DeviceNet.
Status word 2
Status word 2 in the "Positioning with set selection" operating mode contains the selected set
number as well as the PSBs.
Bit Description
0 Address 0 of the current set
1 Address 1 of the current set
2 Address 2 of the current set
3 Address 3 of the current set
4 Address 4 of the current set
5 ... 11 Reserved
12 Programmable status bit 0 (PSB0)
13 Programmable status bit 1 (PSB1)
14 Programmable status bit 2 (PSB2)
15 Reserved
Interpolated Position / Cyclic Synchronous Position Mode
In this chapter you can read about:
Interpolation method ........................................................................................................ 320
Synchronizations method ................................................................................................ 323
The interpolated position / cyclic synchronous position modes are necessary for the
coordinated movement of dependent axes or for moving individual axes with tem-
poral interpolation of the setpoint values. With this, time synchronization mecha-
nisms such as the synchronization object are used for the temporal coordination of
the connected drive axes.

 Loading...
Loading...










