Parker EME
Setting up Compax3
192-120114 N5 C3I22T11 June 2008 135
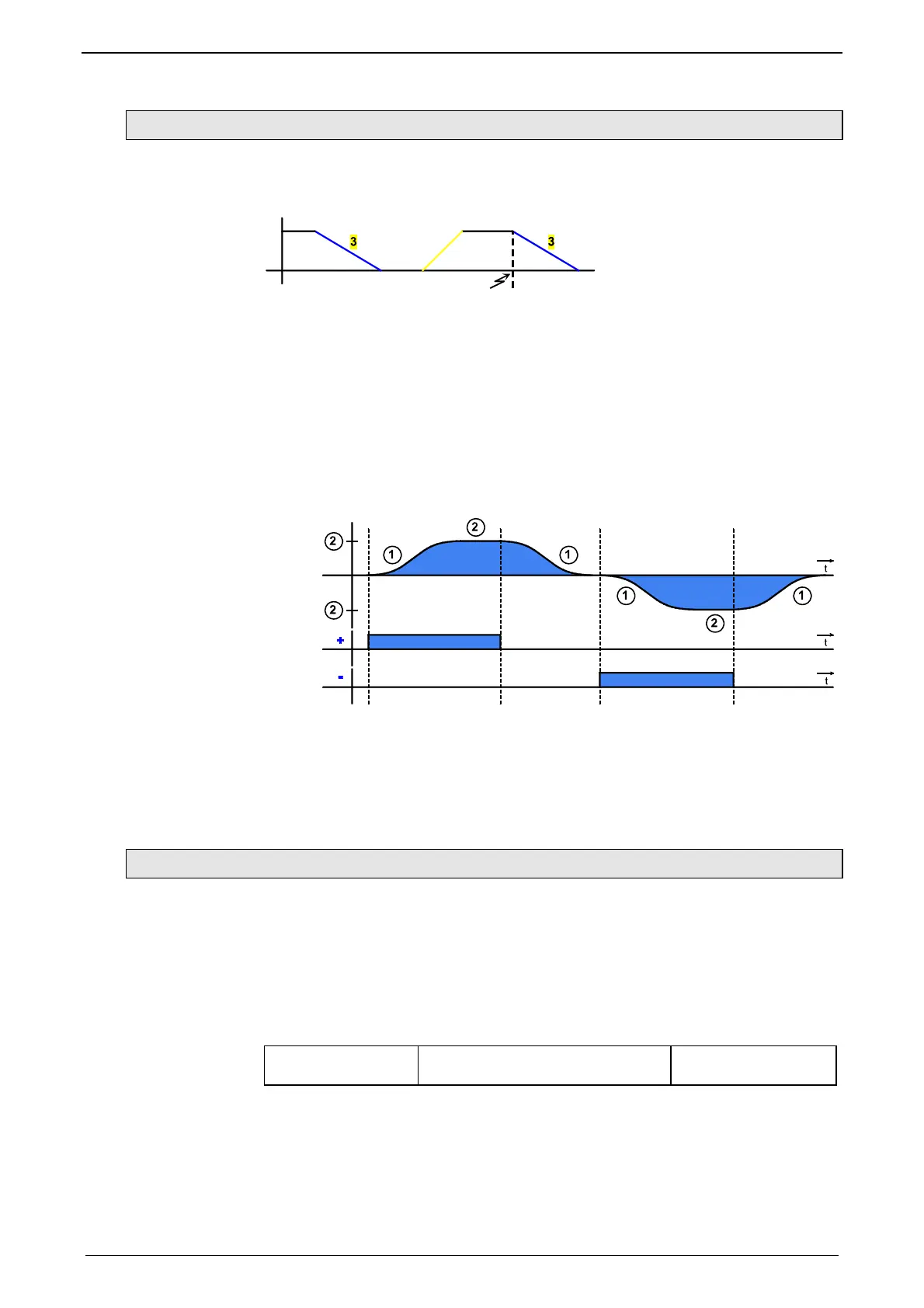
4.1.8.5 Ramp upon error and de-energize
Ramp (delay) upon error and "De-energize"
3: Deceleration on error (status.3 = "1"), Disable Voltage (control.1 = "0" transition
9 of the status machine) and Enable Operation (CW.3 = "0" transition 5 of the sta-
tus machine).
Please observe:
The configured error ramp is limited. The error ramp will not be smaller than the
deceleration set in the last motion set.
JOG acceleration/deceleration and speed control
You can set the motion profile for moving with JOG+ or JOG- here.
--
-
-
1: Manual acceleration / -deceleration
2: Manual speed
+: Manual+ (control.4 ="1")
-: Manual- (control.5 ="1")
Only in "manual" operating mode (DeviceNet-No.C3 object class instance 1100
attribute 5 = -1)
4.1.8.6 Jerk for STOP, JOG and error
The jerk set here applies for:
the STOP ramp
Manual motion
The ramp for the machine reference run
Description of jerk (see page 133)
Jerk
Unit: Length unit/s
3
Range: 0 ... 10 000 000 Standard value:
1 000 000

 Loading...
Loading...










