Setting up Compax3 C3I22T11
134 192-120114 N5 C3I22T11 June 2008
According to VDI2143 the jerk is defined (other than here) as the jump in accelera-
tion (infinite value of the jerk function).
This means that positionings with Compax3 are without jerk according to VDI2143,
as the value of the jerk funciton is limited.
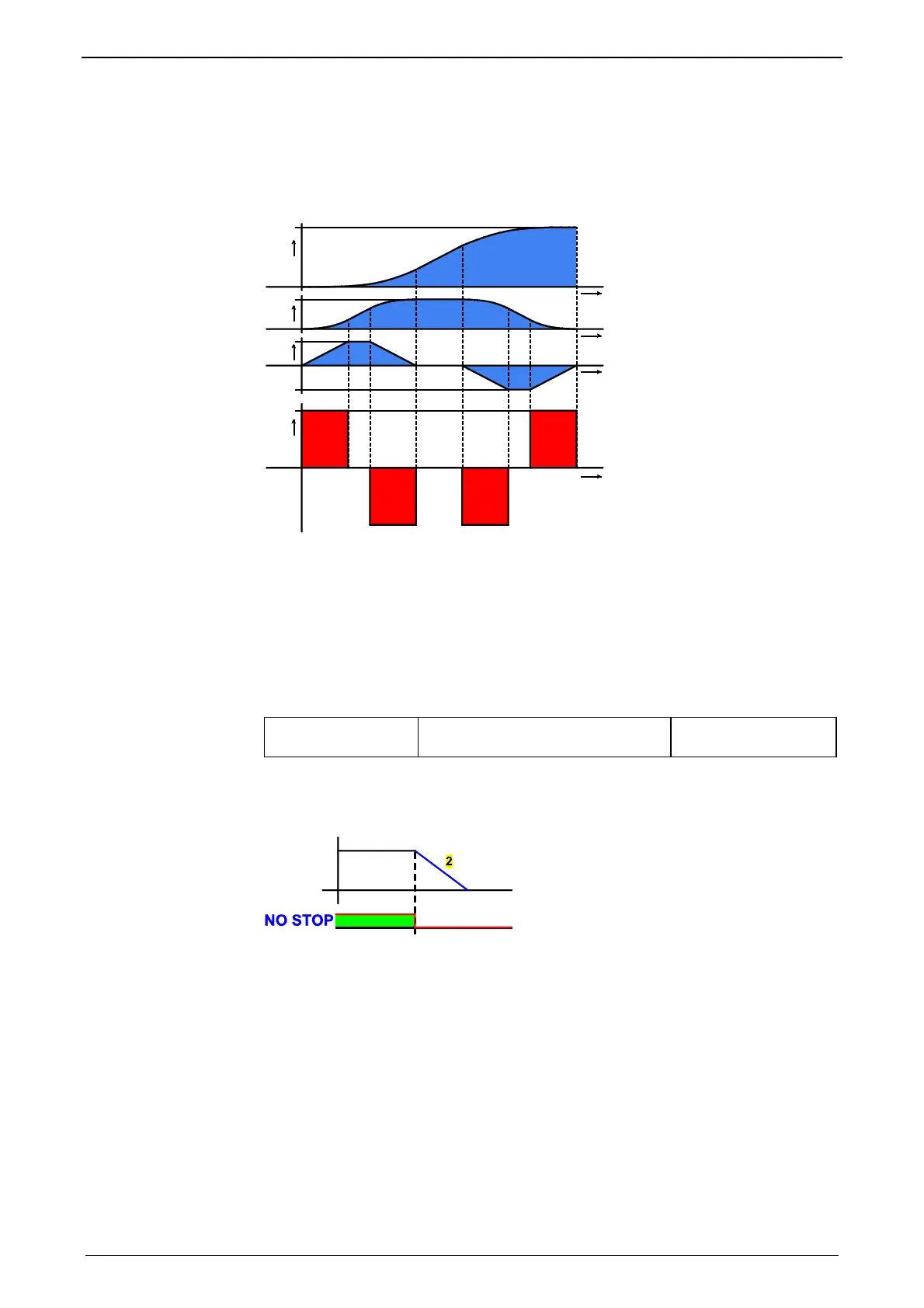
Motion sequence
t
4
t
t
t
1
2
3
1: Position
2: Velocity
3: Acceleration
4: Jerk
High changes in acceleration (high jerks) often have negative effects on the me-
chanical systems involved. There is a danger that mechanical resonance points will
be excited or that impacts will be caused by existing mechanical slack points.
You can reduce these problems to a minimum by specifying the maximum jerk.
Jerk
Unit: Length unit/s
3
Range: 0 ... 10 000 000 Standard value:
1 000 000
Deceleration on STOP
After a STOP signal, the drive applies the brakes with the delay that is set (2).
Please observe:
The configured STOP ramp is limited. The STOP ramp will not be smaller than the
deceleration set in the last motion set.
NO STOP: control.3 = "0" (Quick Stop: Transition 11 of the Status machine (see
page 324))
Without jerk accor-
ding to VDI2143

 Loading...
Loading...










