Setting up Compax3 C3I22T11
154 192-120114 N5 C3I22T11 June 2008
4.1.18. Dynamic positioning
You can change over to a new motion set during a positioning process.
Thereby the following conditions apply:
Acceleration and deceleration remain constant independent of the values prede-
fined in the new motion set.
The jerk, too, remains constant.
The velocity of the new motion set is activated.
The drive moves to the target position defined in the new motion set.
The new motion set address must not equal 0.
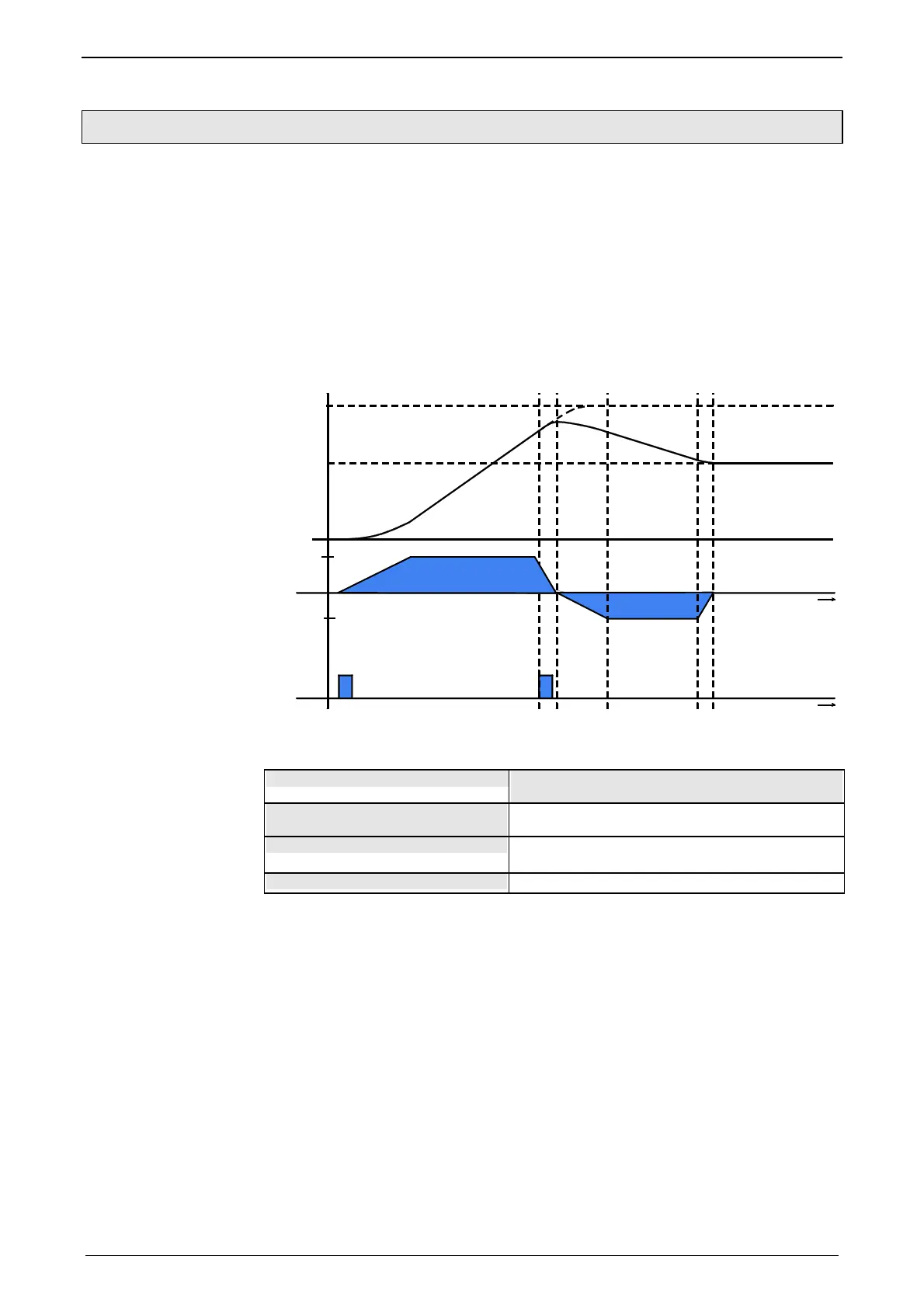
MoveAbs (Target position POS1) is interrupted by a new MoveAbs with target posi-
tion (POS 5)
t
t
Pos 1
Pos 5
START
V 1
-1- -5-
V 5
The following dynamic transitions are supported:
Motion function in progress Possible dynamic change to the motion functi-
on:
MoveAbs, MoveRel, RegSearch,
RegMove, Velocity
MoveAbs, MoveRel, Velocity, RegSearch, Gearing
Gearing
MoveAbs, MoveRel, RegSearch, Gearing (other
gearing factor)
Stop
-
Prerequisite for dynamic positioning is:
Control word 1 Bit 5 = "1" (Change Set immediately)
Example:
Prerequisite:

 Loading...
Loading...










