Communication
C3I22T11
318 192-120114 N5 C3I22T11 June 2008
The command position of the "Cyclic Synchronous Position" is preset via the bus
object 1100.6 "Target position". This bus object can be found on the telegram in
the "Position Mode".
the "Cyclic Synchronous Position" operating mode works in SYNC operation; the
cycle time is preset via bus object 0x1006; please respect the ratings.
Gearing is not possible in the "Cyclic Synchronous Position" operating mode.
A change of the operating mode will trigger a "Stop", if the drive is still moving.
Changing from "Profile Velocity" to another operating mode is only possible in cur-
rentless state.
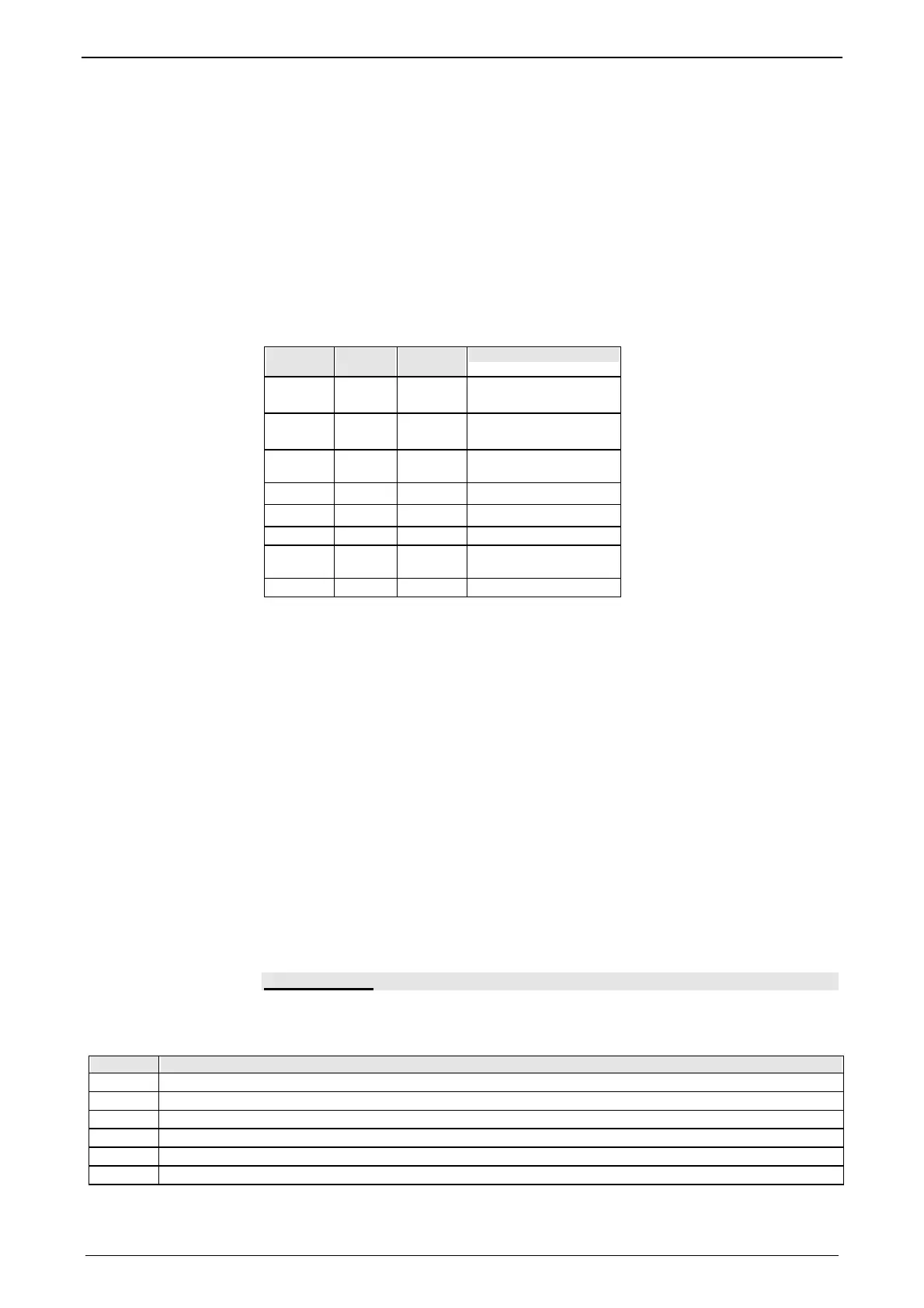
Selection of the positioning mode in the "direct positioning" operating mode
Mode 0
CW.15
Mode1
CW.13
Mode2
CW.6
Function
0 0 0 MoveAbs (see page
145)
0 0 1 MoveRel (see page
145)
0 1 0 MoveAdd (see page 318)
*
0 1 1
Velocity (see page 152)
1 0 0
Gearing (see page 151)
1 0 1 RegMove (see page 146)
1 1 0 RegSearch (see page
146)
1 1 1 Reserved
The setpoint specification is made via target position Y4 (0x2044 / 0x607A, object
1100.6)
* Relative; Example
Positioning mode: absolute
Target position = 1000
Positioning mode: relative
Command: Target position = 200 for actual position 500
Drive travels to 700
Additive; example
Positioning mode: absolute
Target position = 1000
Positioning mode: additive
Command: Target position = 200 for actual position arbitrary
Drive travels to 1200
Control word 2
In the "Positioning with set selection" operating mode, the address of the motion set is specified via
control word 2
Bit Description
0 Address 0 for set selection
1 Address 1 for set selection
2 Address 2 for set selection
3 Address 3 for set selection
4 Address 4 for set selection
5 ... 15 Reserved
Change operating
mode:

 Loading...
Loading...










