Setting up Compax3 C3I22T11
200 192-120114 N5 C3I22T11 June 2008
Electronic simulation of a disturbance torque jerk with the disturbance cur-
rent jerk
Current Controller
Stromregelung
Motor
Speed Controller
Drehzahlregelung
Position Controller
Positionsregler
Xw
Xn i
1
K
T
1
1:
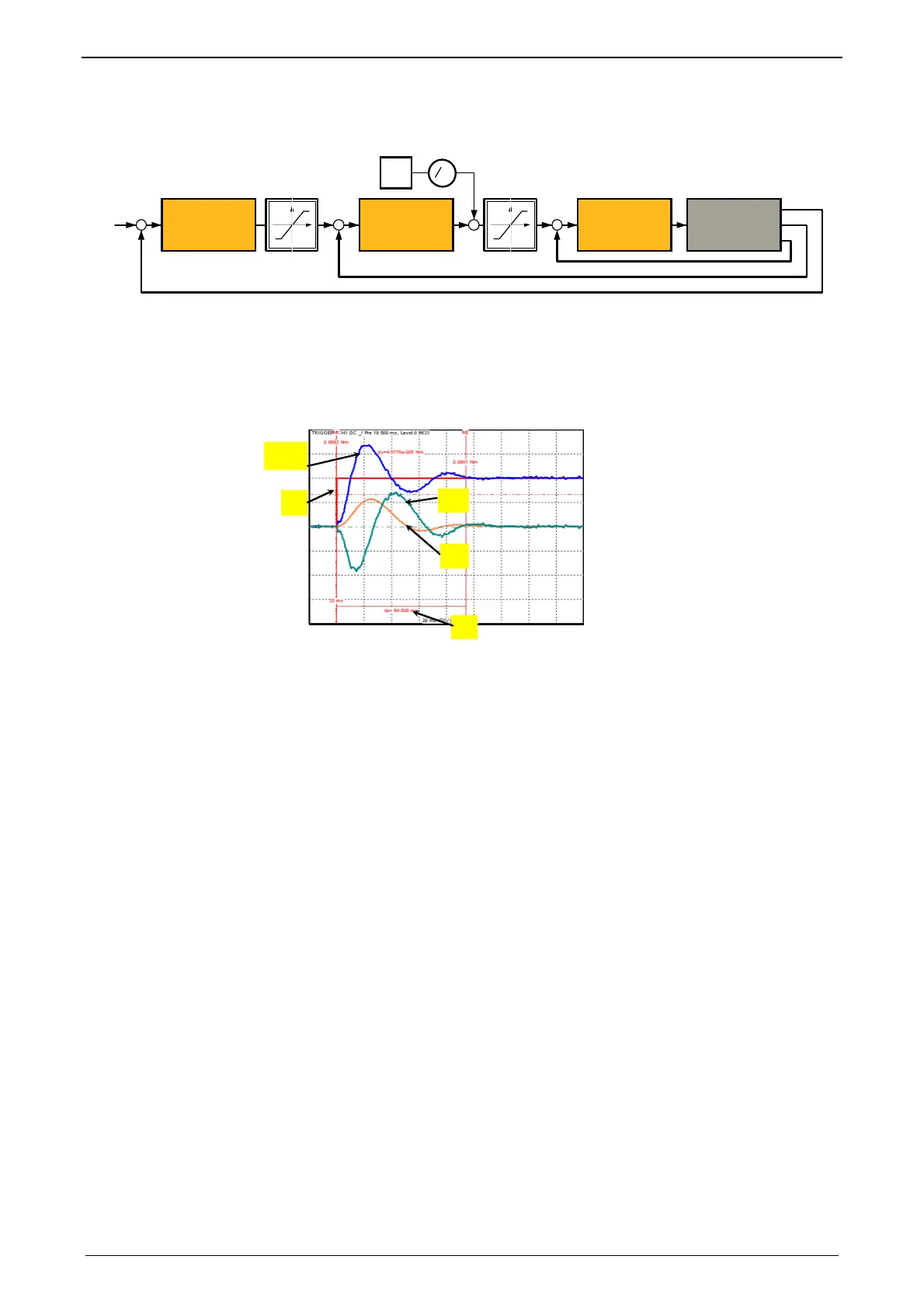
Feeding in of a disturbance current jerk, which corresponds to a disturbance torque jerk.
The maximum amplitude an the settling time of the following error decline with
rising dynamic stiffness. The settling behavior of the following error is furthermore a
measure for the attenuation and the bandwidth of the control.
Disturbance jerk response
5
2
1
3
4
1: Compensation torque of the controller
2: Simulated disturbance torque
3: Actual speed
4: Following error
5: Settling time

 Loading...
Loading...










