Parker EME
Setting up Compax3
192-120114 N5 C3I22T11 June 2008 217
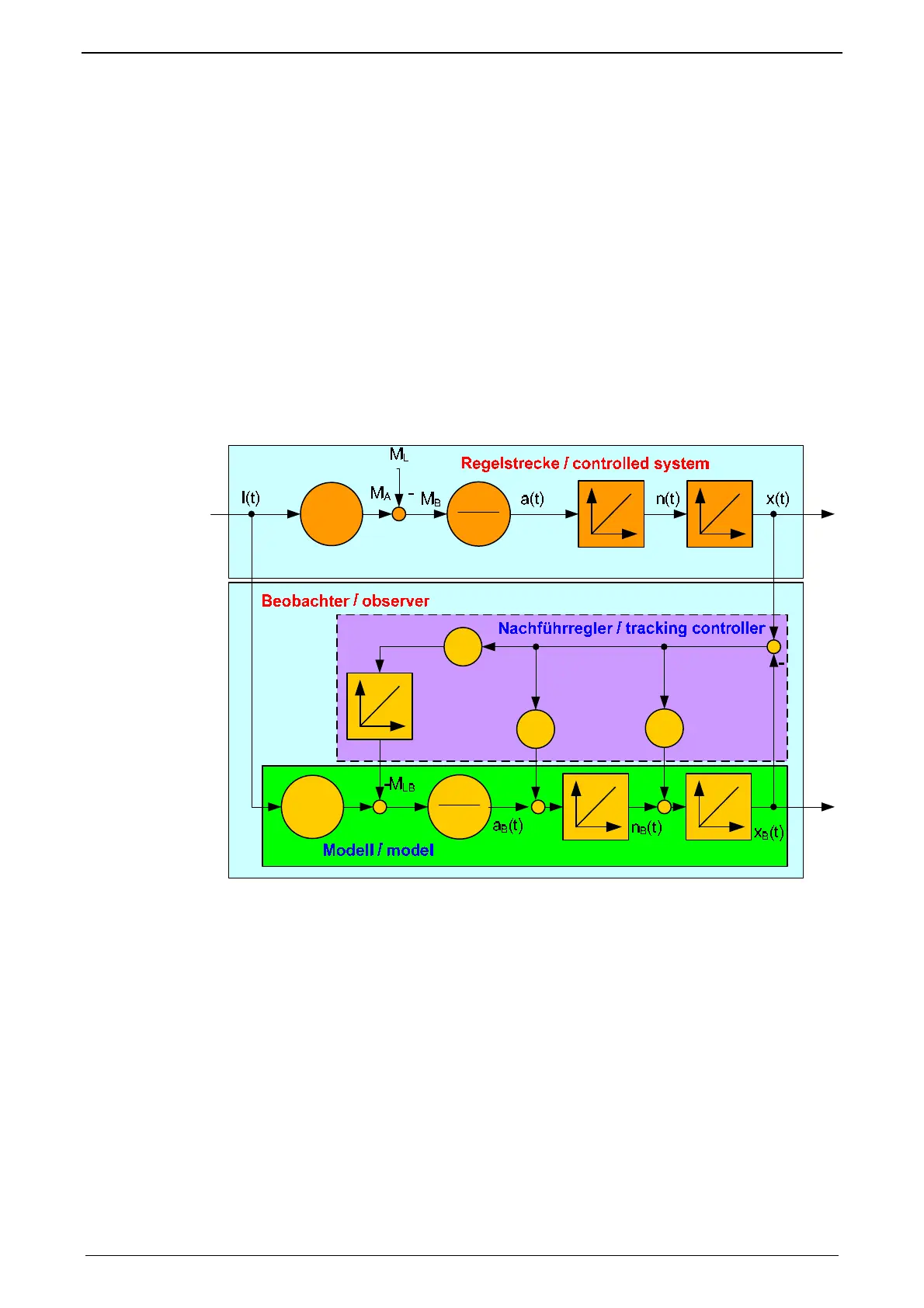
The observer technology offers the advantage that the velocity can be calculated
with the aid of integration. The idea of the observer principle is to connect a ma-
thematical model of the control path parallel to the section observed and with the
same transfer behaviour. In this case, the controller also has the intermediate va-
riables (state variables) of the control path available. However in the presence of
model deviations (in structure or parameters), different signal values occur betwe-
en the model and the control path. For this reason, the technique cannot be em-
ployed in this way in practice. However, the model contains the measurable output
signal of the control section as a redundant quantity. By comparing the two varia-
bles, a tracking control can be used to adapt the model state variables to the state
variables of the control path. As the model deviations have become minor in this
case due to the simple mechanical drive train, the observer now has an efficient aid
available to increase the signal quality. Increase in signal quality in the observer
means that the noise components decrease, and the dynamics improve as the
observed speed is feedforward-controlled undelayed by the current and is not just
calculated delayed from the position signal using simple differentiation.
Signal flow chart Luenberg observer
T
K
Ges
J⋅
π
2
1
T
K
Ges
J⋅
π
2
1
0
h
1
h
2
h
 Loading...
Loading...











