Setting up Compax3 C3I22T11
232 192-120114 N5 C3I22T11 June 2008
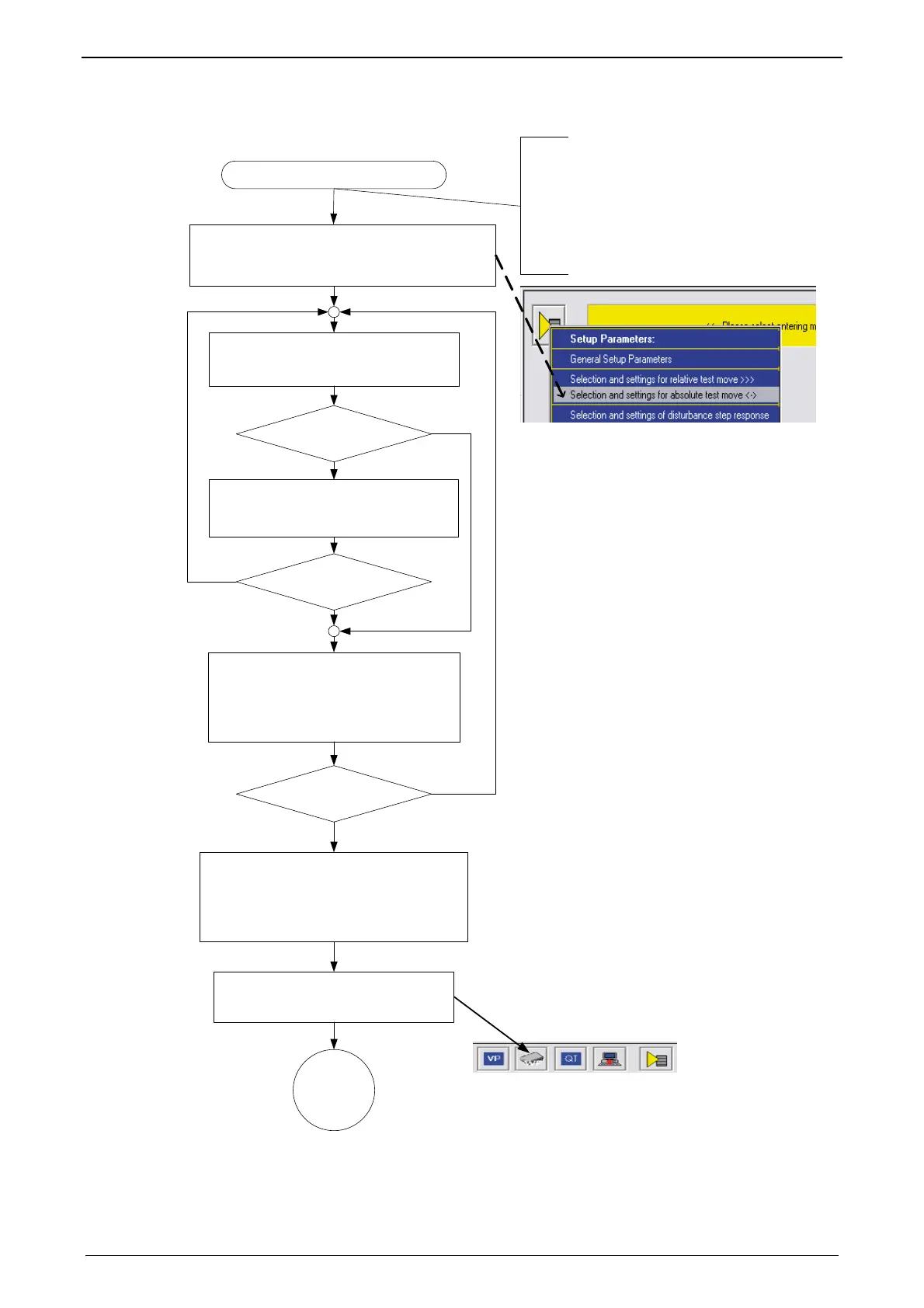
Controller optimization of toothed belt drive
“Controller optimization toothed belt drive”
• Set absolute positioning in the setup window and move over
the entire positioning range at a low speed.
• Increase stiffness up to the tendency to oscillate and adapt
control signal filter (see chapter “control signal filter/..”)
Increase D-component (Obj. 2100.7) of the speed
controller (in steps of 100%..500%) in order to
suppress the tendency to oscillate.
Smooth, stable behavior?
Increase stiffness (Obj. 2100.2)
and adapt control signal filter according to the setting
rule (see chapter “control signal filter/...”)
Smooth, stable behavior?
Increase filter 2 of actual acceleration value (Obj.
2100.11) in order to attenuate the higher-frequency
excitation of the speed controller caused by the
disturbed D component.
Please note: The filtering delays the signal and may
destabilize the control loop.
Smooth, stable behavior?
The following measures can be helpful:
• Further increase filter 2 of actual acceleration value
or reduce again.
• Reduce D-component
• Reduce stiffness
• Reduce control signal filter (speed controller)
• The stiffness of a drive able to oscillate can be increased by using the
D-component. If the D-component is too large, the control is
destabilized.
• Due to the twofold position differentiation, the D-component is rather
disturbed and may excite the control loop in the higher-frequency
range. The filtering of the d-component with the aid of the “filter2 of
actual acceleration value” can activate the higher-frequency
components at the cost of the dynamics.
• The correct combination of the3 parameters will lead to the best
control results.
• The D-component is set in%. The value range: 0...4000000%.
• Values up to 5000 are common.
Main diagram
yes
no
no
yes
yes
no
Store settings with WF.

 Loading...
Loading...










