98
Manual – MOVIDRIVE® MDX61B Safety Module Option MOVISAFE® DCS..B
7
Checking the performance level according to EN ISO 13849-1
Validation
The total response time is calculated as follows:
t
response, max
= t
R1
+ t
R2
+ t
R3
+ t
R4
7.4 Checking the performance level according to EN ISO 13849-1
It has to be checked whether the required performance level (PL
r
), which was deter-
mined in the risk assessment, is achieved by the chosen system for each safety function
used. SEW-EURODRIVE recommends to check the calculation using the SISTEMA
software tool (free of charge) of the employer's liability insurance association. SEW-
EURODRIVE provides a component library which can be used as basis for the calcula-
tion. SEW-EURODRIVE offers corresponding services to support the system check by
calculation.
If you use another method to validate the performance level, you can use the character-
istic safety values specified in the "Appendix" chapter.
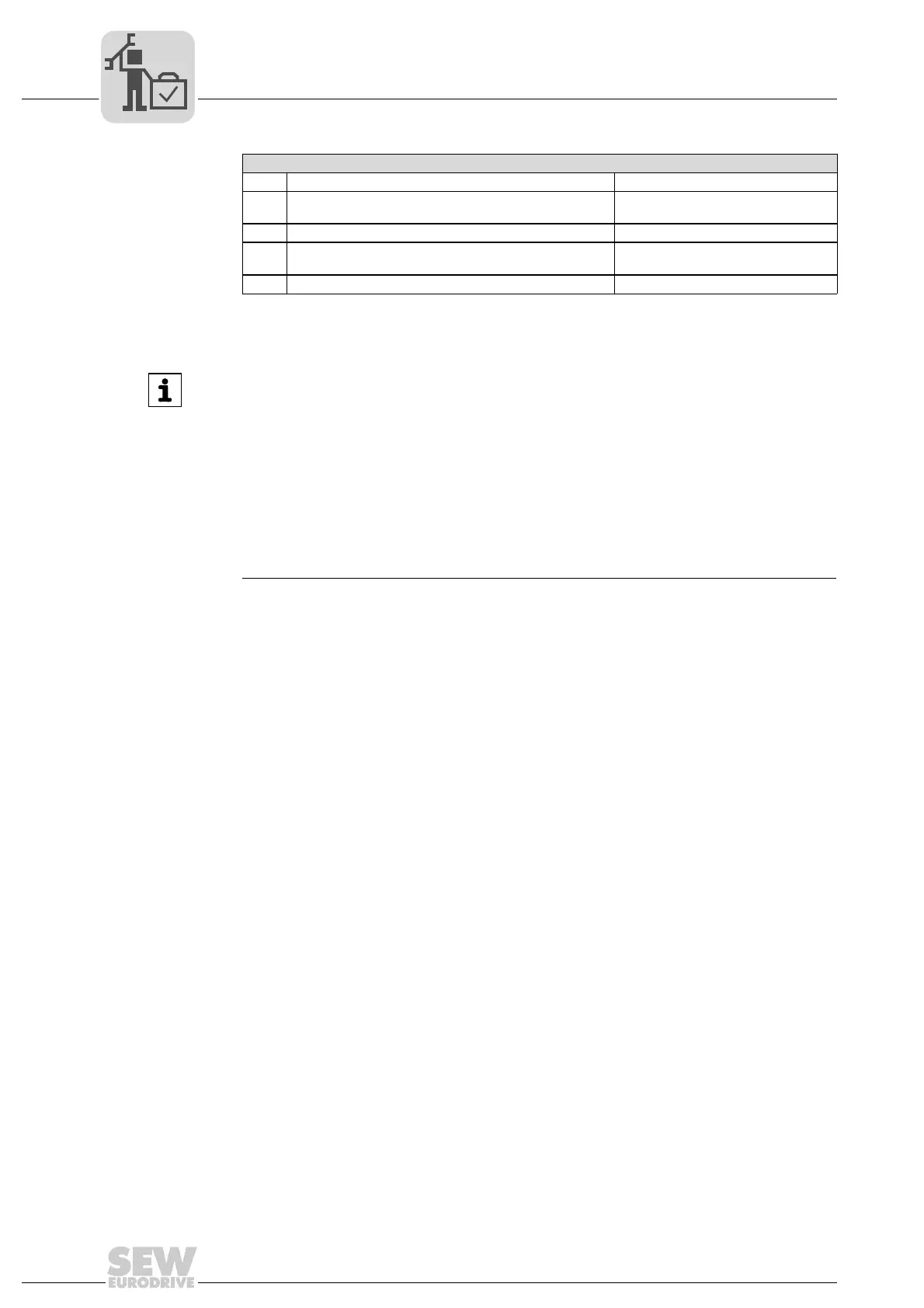
Response time from safety controller to actuator
t
4
F-PLC cycle time (worst case = 2 cycles) Determine from safety controller
t
ps
PROFIsafe cycle time According to the specifications of the
safety controller
t
5
Internal response time of the safe output 56 ms
t
6
Switching time of the actuator According to manufacturer's specifica-
tions
t
R4
Actuator switches after x ms Total
INFORMATION
• The total response time becomes longer when using overspeed distance monitor-
ing of the SLS safety function.
For an example of how to calculate the response time of overspeed distance mon-
itoring, refer to chapter "Calculating the response time with overspeed distance
monitoring".
• The total response time becomes longer when using an SS1/SS2 safety function.
• To reduce the response time, the DCS21B/22B option lets you directly disable the
safe outputs depending on the status of a safety function. You find more informa-
tion in the online help of MOVISAFE
®
Config Assist in chapter "Input screens".
• You find the response times of the various components in the technical data of the
relevant component documentation.
 Loading...
Loading...